FANUCの制御装置では、パラメータ設定によりソフトリミットを設けることができます。
ソフトリミットとは物理的なリミットスイッチではなく、現在座標値から作り出す仮想的なリミットスイッチです。
主に物理的なストローク限界の手前に設定し、設備の破損を回避する目的で使用します。
「FANUC ソフトリミット」で検索をかけてほとんど検索結果が表示されなかったのですが、
FANUCではソフトリミットのことをストアードストロークリミットと呼んでいるため、検索に引っかかりにくいんですね。
今回は、FANUCのストアードストロークリミットについて理解するため解説記事を作成します。
- ストアードストロークリミットのパラメータ
- ストアードストロークリミットの切替方法
注記できる限り取扱説明書に沿った解説をするため、本ページではソフトリミットとは呼ばず、ストアードストロークリミットと記載します。
パラメータ
基本パラメータ
ストアードストロークリミットを設定するために最低限必要なパラメータです。
| 番号 | パラメータNo. | 禁止領域 | |
|---|---|---|---|
| +方向座標値 | -方向座標値 | ||
| 各軸ストアードストロークリミット 1-Ⅰ |
1320 | 1321 | 領域外 |
| 各軸ストアードストロークリミット 2 |
1322 | 1323 | 選択可 (No.1300#0 1:領域内 0:領域外) |
| 各軸ストアードストロークリミット 3 |
1324 | 1325 | 領域内 |
| 各軸ストアードストロークリミット 1-Ⅱ |
1326 | 1327 | 領域外 |
| 各軸ストアードストロークリミット 1-Ⅲ |
1350 | 1351 | 領域外 |
| 各軸ストアードストロークリミット 1-Ⅳ |
1352 | 1353 | 領域外 |
| 各軸ストアードストロークリミット 1-Ⅴ |
1354 | 1355 | 領域外 |
| 各軸ストアードストロークリミット 1-Ⅵ |
1356 | 1357 | 領域外 |
| 各軸ストアードストロークリミット 1-Ⅶ |
1358 | 1359 | 領域外 |
| 各軸ストアードストロークリミット 1-Ⅷ |
1360 | 1361 | 領域外 |
ストアードストロークチェック拡張パラメータ
拡張パラメータを有効にすることで、複数のストアードストロークリミットを設定することができます。
| パラメータNo. | bit No. | シンボル | 詳細 | 備考 |
|---|---|---|---|---|
| 1311 | #7 | |||
| #6 | ||||
| #5 | ||||
| #4 | ||||
| #3 | ||||
| #2 | ||||
| #1 | OT3x | ストアードストロークチェック3 | 0:無効 | |
| 1:有効 | ||||
| #0 | OT2x | ストアードストロークチェック2 | 0:無効 | |
| 1:有効 |
ストアードストロークチェック切り替えパラメータ
PMCよりストアードストロークチェック切換え信号に入力を行うことで、参照するストロークパラメータの座標値を切り替えることができます。
| ストアードストロークチェック切換え信号 | 選択されるストロークパラメータ | ||
|---|---|---|---|
| EXLM3 (G531.7) |
EXLM2 (G531.6) |
EXLM (G007.6) |
|
| 0 | 0 | 0 | 座標値Ⅰ (+方向:No.1320/-方向:No.1321) |
| 0 | 0 | 1 | 座標値Ⅱ (+方向:No.1326/-方向:No.1327) |
| 0 | 1 | 0 | 座標値Ⅲ (+方向:No.1350/-方向:No.1351) |
| 0 | 1 | 1 | 座標値Ⅳ (+方向:No.1352/-方向:No.1353) |
| 1 | 0 | 0 | 座標値Ⅴ (+方向:No.1354/-方向:No.1355) |
| 1 | 0 | 1 | 座標値Ⅵ (+方向:No.1356/-方向:No.1357) |
| 1 | 1 | 0 | 座標値Ⅶ (+方向:No.1358/-方向:No.1359) |
| 1 | 1 | 1 | 座標値Ⅷ (+方向:No.1360/-方向:No.1361) |
ストアードストロークチェック切換え
活用場面
ターレット付きの直交軸の場合、横方向に移動した刃具が装置壁面に衝突する可能性があります。
現在選択中の刃具別にストアードストロークリミットを変更すれば、可動域が大きく取れNCプログラムが組易くなります。
テーブルの旋回角度に応じてストアードストロークリミットを変更するのも、テーブルとの干渉を避ける有効な手段です。
PMCラダー記述
ストアードストロークリミット1は、8通りのパターンを有することができます。
切替はPMCラダーで行う必要があるため、簡単な切り替え回路の雛形を紹介します。
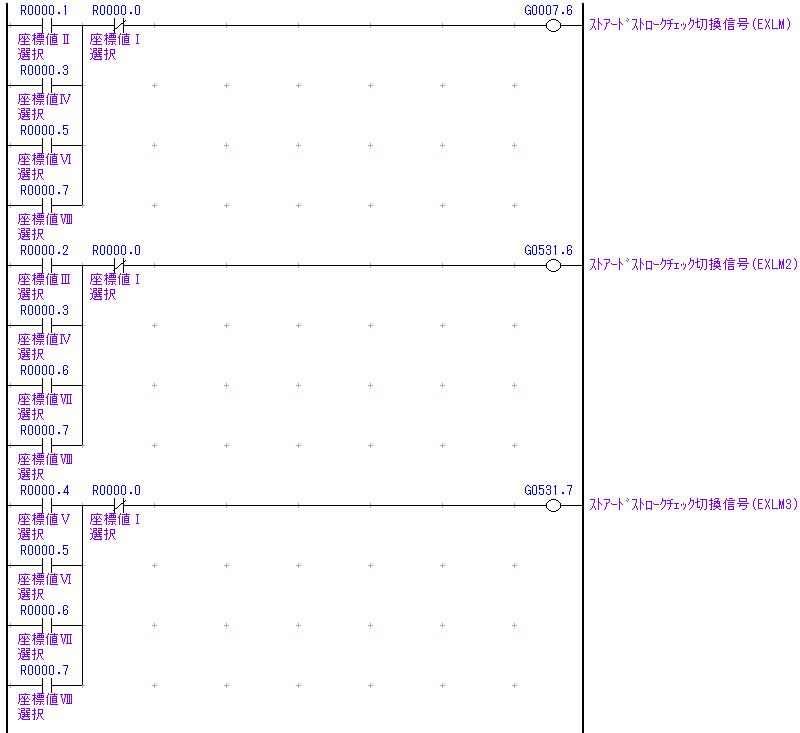
コイルR0.0~R0.7には、各ストアードストロークリミットの切替条件を記述すればOKです。
ストアードストロークリミット1-1しか使用しない場合は、各切替信号への入力は不要です。
あとがき
ソフトリミットはハードリミット手前で1つ設定してあげればよく、複数ソフトリミットを設ける必要性がないような気がします。
この手のパラメータを多用するほど制御がややこしくなりトラブルの元になります。
それでも、こういった知識を知っていることが重要です。引き出しを増やしておくという点で覚えておいて損はないでしょう。
コメント