FANUC 0i MODEL-Fにおける、システム構成関係のパラメータ一覧です。
下記の表からパラメータシンボルを選ぶと、対象のパラメータ説明へジャンプします。
| パラメータNo. | #7 | #6 | #5 | #4 | #3 | #2 | #1 | #0 |
|---|---|---|---|---|---|---|---|---|
| 1201 | WZR | NWS | ZCL | ZPR | ||||
| 1202 | RLC | G92 | EWS | EWD | ||||
| 1203 | EMS | |||||||
| 1205 | WTC | 3TW | R2O | R1O | ||||
| 1206 | HZP | |||||||
| 1207 | WOL |
| パラメータNo. | 詳細 |
|---|---|
| 1220 | 各軸の外部ワーク原点オフセット量 |
| 1221 | ワーク座標系1(G54)のワーク原点オフセット量 |
| 1222 | ワーク座標系2(G55)のワーク原点オフセット量 |
| 1223 | ワーク座標系3(G56)のワーク原点オフセット量 |
| 1224 | ワーク座標系4(G57)のワーク原点オフセット量 |
| 1225 | ワーク座標系5(G58)のワーク原点オフセット量 |
| 1226 | ワーク座標系6(G59)のワーク原点オフセット量 |
| 1240 | 第1レファレンス点の機械座標系での座標値 |
| 1241 | 第2レファレンス点の機械座標系での座標値 |
| 1242 | 第3レファレンス点の機械座標系での座標値 |
| 1243 | 第4レファレンス点の機械座標系での座標値 |
| 1244 | フローティングレファレンス点の機械座標系での座標値 |
| 1250 | 自動座標系設定におけるレファレンス点の座標系 |
| 1260 | 回転軸における1回転あたりの移動量 |
| 1280 | 拡張外部機械原点シフト機能で使用する信号郡の先頭アドレス |
| 1290 | 対向刃物台ミラーイメージにおける刃物台間距離 |
パラメータNo.1201
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
手動レファレンス点復帰を行ったときに、自動座標系設定を
├ 0:利用しない
└ 1:使用する
注意
ZPRはワーク座標系のオプションが付かない場合に有効です
ワーク座標系のオプションが付く場合は、本パラメータの設定にかかわらず、手動レファレンス点復帰をした際は、常にワーク原点オフセット量(パラメータ(No.1220~1226))をもとにワーク座標系が確立されます
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
手動レファレンス点復帰を行ったときに、ローカル座標系をキャンセル
├ 0:しない
└ 1:する
注意
ZCLはワーク座標系が付く場合(パラメータNWZ(No.8136#0)が 0)に有効です
ローカル座標系(G52)を使用するには、パラメータ NWZ(No.8136#0)を0にしてください
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
ワーク座標系シフト量設定画面を表示
├ 0:する
└ 1:しない
注意
ワーク座標系シフト量設定画面を表示しない場合、G10P0によるワーク座標系シフト量の変更はできません
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
パラメータ CLR(No.3402#6)=0の時
- MDIユニットのリセットキー
- 外部リセット信号
- リセット&リワインド信号
- 非常停止信号
によりCNCがリセットされた場合、グループ番号14(ワーク座標系)のGコードを
├ 0:リセット状態にする(G54に戻さない)
└ 1:クリア状態にする(G54に戻す)
注意
- 3次元変換モード中で、パラメータD3R(No.5400#2)=1の時は、本パラメータによらずリセット状態とします
- パラメータCLR(No.3402#6)=1の時は、パラメータC14(No.3407#6)によります
パラメータNo.1202
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
外部ワーク原点オフセット量による座標系のシフト方向は、外部ワーク原点オフセット量の符号に
├ 0:従う
└ 1:逆方向にシフトする
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
外部ワーク原点オフセット量を
├ 0:利用する
└ 1:つかわない
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
ワーク座標系(G52~G59)のオプションが付いているときに、座標系設定のGコード(M系:G92、T系:G50(Gコード体系B,Cの時は G92))が指令された場合は
├ 0:アラームとせず、Gコードを実行する
└ 1:アラーム(PS0010)『使用できないGコードを指令しました』となり、Gコードを実行しない
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
リセットにより、ローカル座標系をキャンセル
├ 0:しない
└ 1:する
注意
- パラメータCLR(No.3402#6)=0かつパラメータWZR(No.1201#7)=1の場合、キャンセルされます
- パラメータCLR(No.3402#6)=1かつパラメータC14(No.3407#6)=0の場合、キャンセルされます
- 3次元座標変換モード中、パラメータD3R(No.5400#2)=1の場合は、キャンセルされません
パラメータNo.1203
| パラメータNo. | #7 | #6 | #5 | #4 | #3 | #2 | #1 | #0 |
|---|---|---|---|---|---|---|---|---|
| 1203 | EMS |
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
拡張外部機械原点シフト機能を
├ 0:つかわない
└ 1:利用する
注意
- 外部機械原点シフト機能もしくは外部データ入力機能が必要です
- 有効とした場合、従来の外部機械原点シフト機能は無効です
パラメータNo.1205
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
レファレンス点位置の信号出力を
├ 0:つかわない
└ 1:利用する
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
第2レファレンス点位置の信号出力を
├ 0:つかわない
└ 1:利用する
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
傾斜面割出し指令モード中にGコードでワーク座標系選択を指令した場合
├ 0:アラーム(PS5462)『指令に誤りがあります(G68.2/G69)』を発生させる
└ 1:ワーク座標系選択を実行する
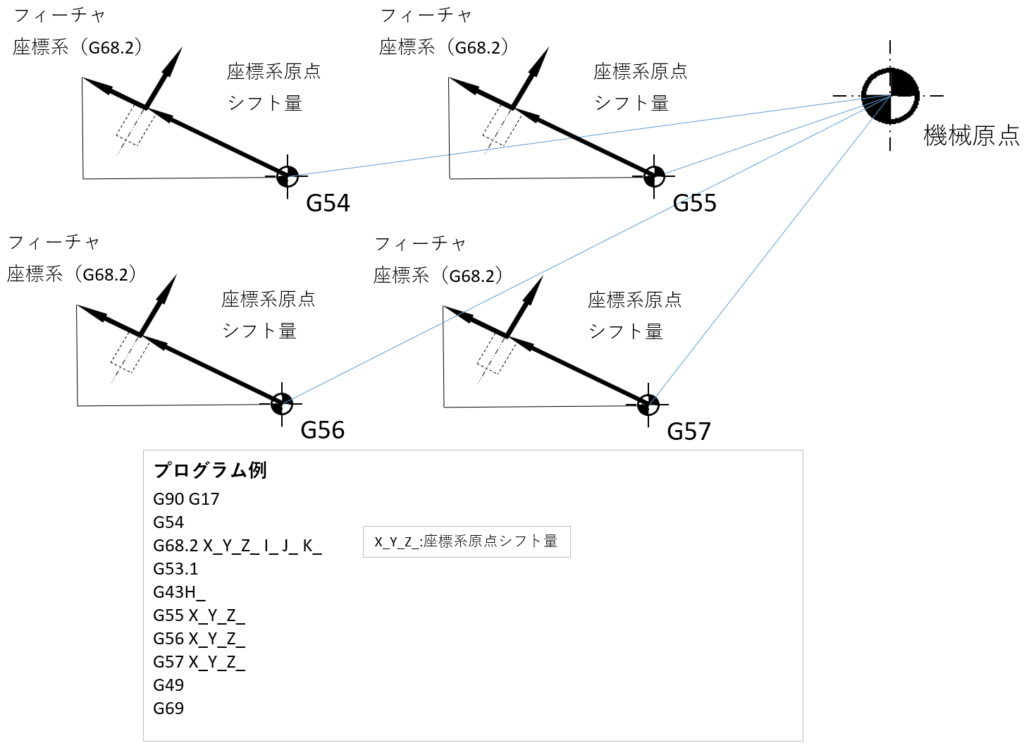
注意
パラメータが1のときに指令できるGコードはG54~G59, G54.1のみで、G52, G92を指令した場合はアラーム(PS5462)が発生します
ただしG54~G59, G54.1が指令された場合、バッファリングが抑制されます
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
ワーク座標系プリセット時、工具移動による工具長補正量(M系)や工具移動による工具位置オフセット(T系)をクリア
├ 0:する
└ 1:しない
注意
本パラメータを設定した場合、工具長補正モードをキャンセルすることなく、以下の指令でワーク座標系をプリセットできます
- Gコード指令
- MDIの操作
- 各軸ワーク座標系プリセット信号WPRST1~WPRST8<Gn358>
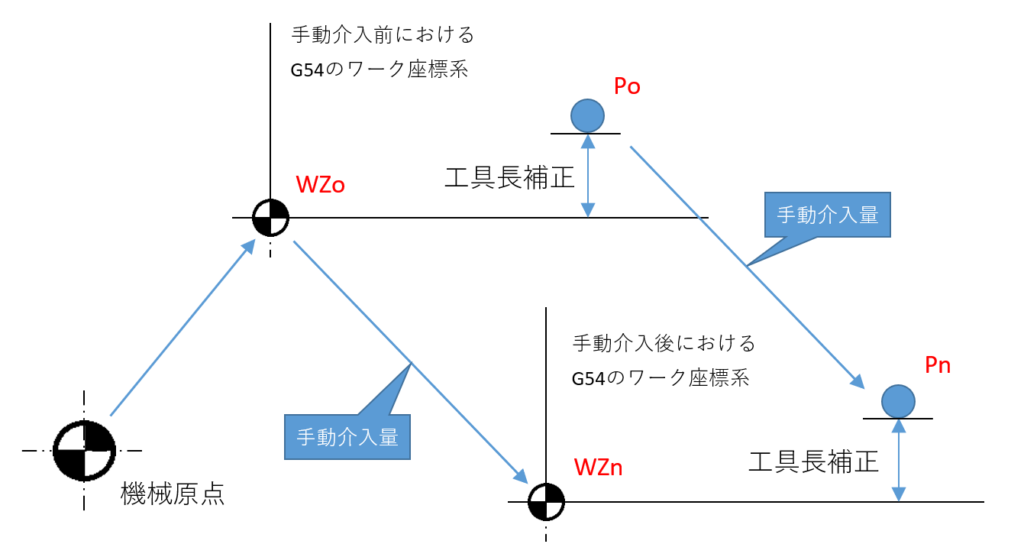
下図のように手動介入すると、手動介入量分シフトされたWZnの座標系が作られます
その後、座標系をプリセットしても工具長補正量は保持されたまま、元のWZoの座標系にプリセットされます
パラメータNo.1206
| パラメータNo. | #7 | #6 | #5 | #4 | #3 | #2 | #1 | #0 |
|---|---|---|---|---|---|---|---|---|
| 1206 | HZP |
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
高速手動レファレンス点復帰時に、座標系のプリセットを
├ 0:利用する
└ 1:つかわない
注意
ワーク座標系を設定せず、パラメータZPR(No.1201#0)=0のときに有効です
パラメータNo.1207
| パラメータNo. | #7 | #6 | #5 | #4 | #3 | #2 | #1 | #0 |
|---|---|---|---|---|---|---|---|---|
| 1207 | WOL |
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
ワーク原点オフセット量測定値直接入力の計算方式は
├ 0:工具長補正量に基準工具との差分を設定する機械において、基準工具を取り付けた状態でワーク原点オフセット量を測定/設定する ※基準工具の工具長は 0 とします
└ 1:工具長補正量に工具長そのものを設定する機械において、取り付けた工具に対応した工具長補正が有効となっている状態で、工具長を加味してワーク原点オフセット量を測定/設定する
注意
M系かつパラメータ DAL(No.3104#6)=1の場合にのみ、本パラメータの設定が有効になります
これ以外の条件において本パラメータを1に設定した場合は、本パラメータを 0に設定したときと同じ動作となります
パラメータNo.1220
| パラメータNo. | 詳細 |
|---|---|
| 1220 | 各軸の外部ワーク原点オフセット量 |
- 入力区分
└ パラメータ入力 - データ形式
└ 実数軸形 - データ単位
└ mm、inch、度(入力単位) - データ最小単位
└ 該当軸の設定単位に従う - データ範囲
└ 最小設定単位の 9桁分(標準パラメータ設定表(A)参照)※IS-Bの場合、-999999.999~+999999.999
ワーク座標系(G54~G59)の原点の位置を与えるパラメータの一つ
ワーク原点オフセット量が各ワーク座標系ごとに異なるのに対して、すべてのワーク座標系に共通のオフセット量を与えます
また外部データ入力機能を用いてPMCからも値を設定できます
パラメータNo.1221、1222、1223、1224、1225、1226
| パラメータNo. | 詳細 |
|---|---|
| 1221 | ワーク座標系1(G54)のワーク原点オフセット量 |
| 1222 | ワーク座標系2(G55)のワーク原点オフセット量 |
| 1223 | ワーク座標系3(G56)のワーク原点オフセット量 |
| 1224 | ワーク座標系4(G57)のワーク原点オフセット量 |
| 1225 | ワーク座標系5(G58)のワーク原点オフセット量 |
| 1226 | ワーク座標系6(G59)のワーク原点オフセット量 |
- 入力区分
└ パラメータ入力 - データ形式
└ 実数軸形 - データ単位
└ mm、inch、度(入力単位) - データ最小単位
└ 該当軸の設定単位に従う - データ範囲
└ 最小設定単位の 9桁分(標準パラメータ設定表(A)参照)※IS-Bの場合、-999999.999~+999999.999
ワーク座標系 1~6(G54~G59)のワーク原点オフセット量を設定します
パラメータNo.1240
| パラメータNo. | 詳細 |
|---|---|
| 1240 | 第1レファレンス点の機械座標系での座標値 |
- 入力区分
└ パラメータ入力 - データ形式
└ 実数軸形 - データ単位
└ mm、inch、度(入力単位) - データ最小単位
└ 該当軸の設定単位に従う - データ範囲
└ 最小設定単位の 9桁分(標準パラメータ設定表(A)参照)※IS-Bの場合、-999999.999~+999999.999
レファレンス点の機械座標系における座標値を設定します
パラメータNo.1241、1242、1243
- 入力区分
└ パラメータ入力 - データ形式
└ 実数軸形 - データ単位
└ mm、inch、度(入力単位) - データ最小単位
└ 該当軸の設定単位に従う - データ範囲
└ 最小設定単位の 9桁分(標準パラメータ設定表(A)参照)※IS-Bの場合、-999999.999~+999999.999
第2~第4レファレンス点の機械座標系における座標値を設定します
パラメータNo.1244
| パラメータNo. | 詳細 |
|---|---|
| 1244 | フローティングレファレンス点の機械座標系での座標値 |
- 入力区分
└ パラメータ入力 - データ形式
└ 実数軸形 - データ単位
└ mm、inch、度(入力単位) - データ最小単位
└ 該当軸の設定単位に従う - データ範囲
└ 最小設定単位の 9桁分(標準パラメータ設定表(A)参照)※IS-Bの場合、-999999.999~+999999.999
フローティングレファレンス点の機械座標系における座標値を設定します
パラメータNo.1250
| パラメータNo. | 詳細 |
|---|---|
| 1250 | 自動座標系設定におけるレファレンス点の座標系 |
- 入力区分
└ パラメータ入力 - データ形式
└ 実数軸形 - データ単位
└ mm、inch、度(入力単位) - データ最小単位
└ 該当軸の設定単位に従う - データ範囲
└ 最小設定単位の9桁分(標準パラメータ設定表(A)参照)※IS-Bの場合、-999999.999~+999999.999
自動座標系設定を行うときの各軸のレファレンス点の座標系を設定します
パラメータNo.1260
| パラメータNo. | 詳細 |
|---|---|
| 1260 | 回転軸における1回転あたりの移動量 |
- 入力区分
└ パラメータ入力 - データ形式
└ 実数軸形 - データ単位
└ 度 - データ最小単位
└ 該当軸の設定単位に従う - データ範囲
└ 0または正の最小設定単位における9桁分(標準パラメータ設定表(B)参照)※IS-Bの場合、-0.0~+999999.999
回転軸に対して 1回転当りの移動量を設定します
円筒補間を行う回転軸については標準設定値を設定してください
パラメータNo.1280
| パラメータNo. | 詳細 |
|---|---|
| 1280 | 拡張外部機械原点シフト機能で使用する信号郡の先頭アドレス |
- 入力区分
└ パラメータ入力 - データ形式
└ 2ワード系統形 - データ範囲
└ 0 ~ 59999内の偶数値
拡張外部機械原点シフト機能で使用する信号群の先頭アドレスを設定します
存在しない値が設定された場合、本機能は無効です
例えば100が設定されるとR100~が本機能で使用されます
使用される最後のRアドレスは制御軸数によって異なり、8軸制御だとR100~R115です
注意
- 存在しないRアドレス、またはシステム領域のアドレスが設定されると本機能は無効です
- かならず偶数値を設定してください
- 設定値が0だとアドレスR0からの内部リレーが使用されます
- 本パラメータに設定したアドレスを別の用途で使用していた場合には、予期しない機械動作が起きます
使用する内部リレーが競合しないよう十分に注意してください
パラメータNo.1290
| パラメータNo. | 詳細 |
|---|---|
| 1290 | 対向刃物台ミラーイメージにおける刃物台間距離 |
- 入力区分
└ パラメータ入力 - データ形式
└ 実数系統形 - データ単位
└ mm、inch(入力単位) - データ最小単位
└ 基準軸の設定単位に従う - データ範囲
└ 0または正の最小設定単位の9桁分(標準パラメータ設定表(B)参照)※IS-Bの場合 0.0~+999999.999
対向刃物台ミラーイメージにおける刃物台間の距離を設定します
コメント
コメント一覧 (1件)
お世話になっています、いつも参考にさせてもらっています、貴重なお話ありがとうございます。ファナックNC旋盤のワーク原点なのですが、オフセット画面の形状の値を使うこともありますか?プログラムにG54等は無いようです、現在のタレット番号に応じて形状の値をワーク原点にしている気がします(機会メーカー高松)、ご教授頂けると幸いです、よろしくお願いします