工具が機械の移動限界を超えた際に”オーバートラベル”アラームが発生します。
オーバートラベルアラームには
- ハードウェアリミットへ到達した
- パラメータで設定したソフトウェアリミットへ到達した
の2種類が存在します。
アラームの解除方法は共通です。
今回はハードウェアリミットをもとに、アラームの解除方法を解説します。
ソフトウェアリミットとは?
指定の座標より軸が移動するのをソフトウェア制御にて制限する機能。
パラメータにより設定できます。

オーバートラベルとは
ストロークエンドを検出する
軸がストロークエンド以上に移動する”オーバーストローク”を防止するための機能。
プラス&マイナス方向に設けられたリミットスイッチに到達すると、サーボモータを停止します。
これにより、サーボモータの破損を防ぎます。
アラームが発生する
ストロークエンドのリミットスイッチに到達すると、つぎのアラームが発生します。
| 番号 | メッセージ | 内 容 |
|---|---|---|
| OT0506 | +オーバートラベル(ハードリミット) | プラス側のストロークリミットスイッチを踏みました。 機械がストロークエンドに達するとアラームとします。 アラーム発生時、 ・自動運転の場合、全軸の送りは停止します。 ・手動運転の場合、アラームとなった軸の送りのみ停止します。 |
| OT0507 | -オーバートラベル(ハードリミット) | マイナス側のストロークリミットスイッチを踏みました。 機械がストロークエンドに達するとアラームとします。 アラーム発生時、 ・自動運転の場合、全軸の送りは停止します。 ・手動運転の場合、アラームとなった軸の送りのみ停止します。 |
ハードウェアリミットのオーバートラベルアラーム以外は、次の記事を参照してください。
オーバートラベルの解除方法
アラーム発生軸と方向を確認
まず、アラーム発生時のメッセージを確認します。
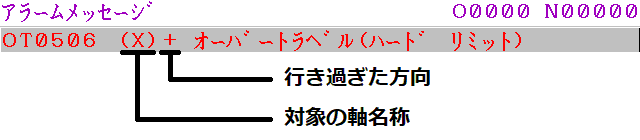
メッセージには対象の軸と方向が表示されているため、復旧する軸と方向を検討します。
今回のアラームを例に取ると、
- 対象はX軸
- プラス方向に行き過ぎた
ことがわかります。
そのため、復旧作業はX軸をマイナス方向へ移動させればいいですね。
軸を復旧方向へ移動させる
手動パルス発生機を使用する方法
手動パルス発生機をつかったJOG(ハンドル)モードを使用します。
この方法は操作がカンタンなのでおすすめです。
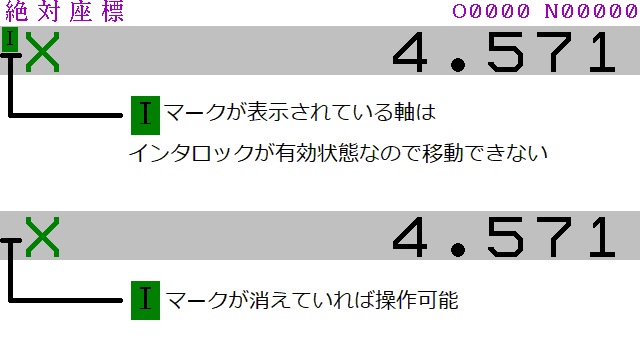
座標表示(ポジション)画面から、対象軸がJOG送りできるか確認します。
軸名称の左上に”I”(インターロック)マークが消えていればJOG運転が可能。
インターロック解除条件はメーカーごとに異なります。
解除方法がわからないときは、メーカーへ問い合わせてください。
インターロックとは?
電気的・機械的に条件が整わないと動作を制限する機構。
機械の保護や作業者の安全など、安全装置や安全機構に関する考え方です。
実際に軸を動かしていきます。
- ハンドルモードへ変更
- 移動対称軸を選択
- オーバーライドをできる限り遅く設定
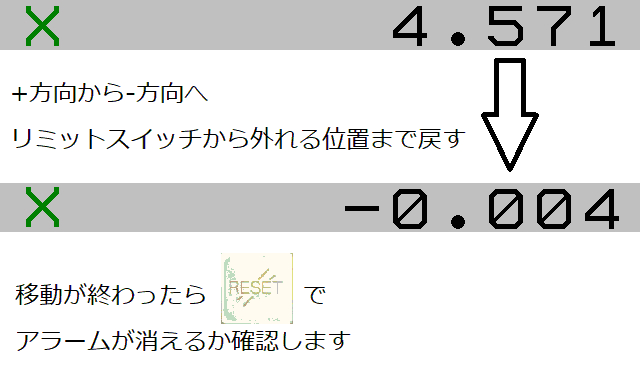
- マイナス方向へハンドルを回す
- ハードキー[リセット]を押してアラームが消えるか確認
以上でオーバートラベルアラームの解除は終了です。
物理的に移動させる
軸を物理的に移動させる方法もあります。
あまりオススメしませんが、どうにもならないときの手段として説明します。
条件
- 物理的に移動可能な構造であること
- ブレーキ付きモーターではないこと
復旧方法
- 非常停止状態にする
- サーボモータがサーボオフしていることを確認
- 人力で軸を移動させる
- 座標が変わっていることを確認し[リセット]を押す
復旧できない場合
リミットスイッチの故障
リミットスイッチの故障が考えられます。
FANUCのサービスへ連絡し、修理を依頼してください。
オーバートラベルアラームを無効化するパラメータを紹介します。
自己責任でご使用ください。
[入力区分]パラメータ入力
[データ形式]ビット系統形
[機能]
オーバートラベル信号のチェックを
0:行う
1:行わない
あとがき
今回はオーバートラベルアラームについて解説しました。
ソフトウェアリミットが設定されていれば、発生するアラームではありません。
アラームが発生する原因となりそうなのは、故障等で機械を分解した直後などが当てはまりそうです。
本記事がオーバートラベルアラームで困っている人のお役に立てれば幸いです。
コメント