三菱電機製サーボアンプMR-J4シリーズの基本設定パラメータ詳細です。
目次
基本設定パラメータ ([Pr. PA_ _ ])
PA1 *STY運転モード
スクロールできます
| 設定桁 | 機能 | 初期 値 [単位] |
|---|---|---|
| _ _ _ x | 制御モード選択 制御モードを選択してください。 0: 位置制御モード 1: 位置制御モードと速度制御モード 2: 速度制御モード 3: 速度制御モードとトルク制御モード 4: トルク制御モード 5: トルク制御モードと位置制御モード | 0h |
| _ _ x _ | 運転モード選択 0: 標準制御モード 1: フルクローズド制御モード 4: リニアサーボモータ制御モード 6: DDモータ制御モード 上記以外の値を設定すると [AL. 37 パラメータ異常] が発生します。 リニアサーボシステム、ダイレクトドライブサーボシステムおよびフルクローズドシステムは、ソフトウエアバージョンA5以降のMR-J4-A-(-RJ)サーボアンプで使用できます。 MR-J4-03A6(-RJ)サーボアンプの場合,この桁は初期値以外の設定では使用できません。 | 0h |
| _ x _ _ | メーカ設定用 | 0h |
| x _ _ _ | メーカ設定用 | 1h |
PA02 *REG 回生オプション
スクロールできます
| 設定桁 | 機能 | 初期 値 |
|---|---|---|
| _ _ x x | 回生オプション 回生オプションを選択してください。 設定を間違えると回生オプションを焼損する場合があります。 サーボアンプと組合せのない回生オプションを選択すると,[AL. 37 パラメータ異常] が発生します。 00: 回生オプションを使用しない ・100 Wのサーボアンプの場合,回生抵抗器を使用しない。 ・0.2 kW ~ 7 kWのサーボアンプの場合,内蔵回生抵抗器を使用する。 ・11 kW ~ 22 kWのサーボアンプで付属の回生抵抗器または回生オプションを使用する。 01: FR-RC-(H)/FR-CV-(H)/FR-BU2-(H)/FR-XC-(H)FR-RC-(H),FR-CV-(H) およびFR-XC-(H) を使用する場合 [Pr. PC27] の “不足電圧アラーム検出方式選択” で “[AL. 10] 発生時 (_ _ _ 1)” を選択してください。 02: MR-RB032 03: MR-RB12 04: MR-RB32 05: MR-RB30 06: MR-RB50 (冷却ファンが必要) 08: MR-RB31 09: MR-RB51 (冷却ファンが必要) 0B: MR-RB3N 0C: MR-RB5N (冷却ファンが必要) 80: MR-RB1H-4 81: MR-RB3M-4 (冷却ファンが必要) 82: MR-RB3G-4 (冷却ファンが必要) 83: MR-RB5G-4 (冷却ファンが必要) 84: MR-RB34-4 (冷却ファンが必要) 85: MR-RB54-4 (冷却ファンが必要) 91: MR-RB3U-4 (冷却ファンが必要) 92: MR-RB5U-4 (冷却ファンが必要) FA: 11 kW ~ 22 kWのサーボアンプで付属の回生抵抗器または回生オプションを冷却ファンで冷却し、能力UPするときMR-J4-03A6(-RJ)サーボアンプの場合 この桁は初期値以外の設定では使用できません。 | 00h |
| _ x _ _ | メーカ設定用 | 0h |
| x _ _ _ | メーカ設定用 | 0h |
PA03 *ABS 絶対位置検出システム
スクロールできます
| 設定桁 | 機能 | 初期値 |
|---|---|---|
| _ _ _ x | 絶対位置検出システム選択 位置制御モードにおいて絶対位置検出システムを使用する場合、この桁を設定してください。 0: 無効 (インクリメンタルシステム) 1: 有効 (DIOによる絶対位置検出システム) 2: 有効 (通信による絶対位置検出システム) (ソフトウエアバージョンA3以降から対応) インクリメンタルタイプのリニアエンコーダ使用時、またはセミクローズド/フルクローズド切換え有効時には、絶対位置検出システムは使用できません。 このときに絶対位置検出システムを有効にすると、[AL. 37] が発生します。 絶対位置検出システムを構築する場合、制約事項があります。 | 0h |
| _ _ x _ | メーカ設定用 | 0h |
| _ x _ _ | メーカ設定用 | 0h |
| x _ _ _ | メーカ設定用 | 0h |
PA04 *AOP1 機能選択A-1
スクロールできます
| 設定桁 | 機能 | 初期値 |
|---|---|---|
| _ _ _ x | メーカ設定用 | 0h |
| _ _ x _ | メーカ設定用 | 0h |
| _ x _ _ | メーカ設定用 | 0h |
| x _ _ _ | 強制停止減速機能選択 0: 強制停止減速機能無効 (EM1を使用する。) 2: 強制停止減速機能有効 (EM2を使用する。) | 2h |
強制停止減速機能選択
スクロールできます
| 設定値 | EM2/EM1の選択 | EM2またはEM1がオフ | アラームが発生 |
|---|---|---|---|
| 0 _ _ _ | EM1 | 強制停止減速を行わずにMBR (電磁ブレーキインタロック) がオフになる。 | 強制停止減速を行わずにMBR (電磁ブレーキインタロック) がオフになる。 |
| 2 _ _ _ | EM2 | 強制停止減速後にMBR (電磁ブレーキインタロック)がオフになる。 | 強制停止減速後にMBR (電磁ブレーキインタロック)がオフになる。 |
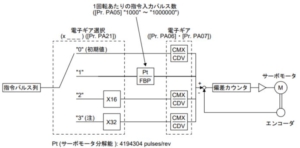
PA05 *FBP 1回転あたりの指令入力パルス数
スクロールできます
| 機能 | 初期 値 |
|---|---|
| 設定された指令入力パルスでサーボモータが1回転します。 [Pr. PA21] の “電子ギア選択” で “1回転あたりの指令入力パルス数 (1 _ _ _ )” を選択すると、このパラメータの設定値が有効になります。 ただし、リニアサーボモータ制御モード時は,[Pr. PA21] に “1 _ _ _” を設定できません。 設定範囲: 1000 ~ 1000000 | 10000 |
PA06 CMX 電子ギア分子(指令パルス倍率分子)
スクロールできます
| 機能 | 初期 値 |
|---|---|
| 電子ギア分子を設定してください。 このパラメータは,[Pr. PA21] の “電子ギア選択” で “電子ギア (0 _ _ _ )”、”J3電子ギア設定値互換モード (2 _ _ _ )” または “J2S電子ギア設定値互換モード (3 _ _ _ )” を選択したときに有効になります。 ただし,MR-J4-03A6(-RJ)サーボアンプでは “J3電子ギア設定値互換モード (2 _ _ _ )” および “J2S電子ギア設定値互換モード (3 _ _ _)” は選択できません。 設定範囲: 1 ~ 16777215 | 1 |
電子ギア設定範囲の目安
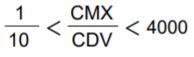
範囲外の値を設定すると、加減速時に音がしたり、設定した速度および加減速時定数で運転できないことがあります。
電子ギアの設定は,誤設定による予期しない動きを防ぐため,必ずサーボオフ状態で行ってください。
注意
この設定値はソフトウエアバージョンB3以降のサーボアンプで使用できます。
PA07 CDV 電子ギア分母(指令パルス倍率分母)
スクロールできます
| 機能 | 初期 値 |
|---|---|
| 電子ギア分母を設定してください。 このパラメータは,[Pr. PA21] の “電子ギア選択” で “電子ギア (0 _ _ _ )”,”J3電子ギア設定値互換モード (2 _ _ _ )” または “J2S電子ギア設定値互換モード (3 _ _ _ )” を選択したときに有効になります。 ただし、MR-J4-03A6(-RJ)サーボアンプでは “J3電子ギア設定値互換モード (2 _ _ _ )” および “J2S電子ギア設定値互換モード (3 _ _ _ )” は選択できません。 設定範囲: 1 ~ 16777215 | 1 |
PA08 ATU オートチューニングモード
スクロールできます
| 設定桁 | 機能 | 初期値 |
|---|---|---|
| _ _ _ x | ゲイン調整モード選択 ゲイン調整モードを選択してください。 0: 2ゲイン調整モード1 (補間モード) 1: オートチューニングモード1 2: オートチューニングモード2 3: マニュアルモード 4: 2ゲイン調整モード2 | 1h |
| _ _ x _ | メーカ設定用 | 0h |
| _ x _ _ | メーカ設定用 | 0h |
| x _ _ _ | メーカ設定用 | 0h |
ゲイン調整モード選択
スクロールできます
| 設定値 | ゲイン調整モード | 自動調整されるパラメータ |
|---|---|---|
| _ _ _ 0 | 2ゲイン調整モード1 (補間モード) | [Pr. PB06 負荷慣性モーメント比] [Pr. PB08 位置制御ゲイン] [Pr. PB09 速度制御ゲイン] [Pr. PB10 速度積分補償] |
| _ _ _ 1 | オートチューニング モード1 | [Pr. PB06 負荷慣性モーメント比] [Pr. PB07 モデル制御ゲイン] [Pr. PB08 位置制御ゲイン] [Pr. PB09 速度制御ゲイン] [Pr. PB10 速度積分補償] |
| _ _ _ 2 | オートチューニング モード2 | [Pr. PB07 モデル制御ゲイン] [Pr. PB08 位置制御ゲイン] [Pr. PB09 速度制御ゲイン] [Pr. PB10 速度積分補償] |
| _ _ _ 3 | マニュアルモード | なし |
| _ _ _ 4 | 2ゲイン調整モード2 | [Pr. PB08 位置制御ゲイン] [Pr. PB09 速度制御ゲイン] [Pr. PB10 速度積分補償] |
PA09 RSP オートチューニング応答性
オートチューニングの応答性を設定してください。
設定範囲:1~40
| 設定値 | 機械共振周波数の目安[Hz] |
|---|---|
| 1 | 2.7 |
| 2 | 3.6 |
| 3 | 4.9 |
| 4 | 6.6 |
| 5 | 10.0 |
| 6 | 11.3 |
| 7 | 12.7 |
| 8 | 14.3 |
| 9 | 16.1 |
| 10 | 18.1 |
| 11 | 20.4 |
| 12 | 23.0 |
| 13 | 25.9 |
| 14 | 29.2 |
| 15 | 32.9 |
| 16 | 37.0 |
| 17 | 41.7 |
| 18 | 47.0 |
| 19 | 52.9 |
| 20 | 59.6 |
| 21 | 67.1 |
| 22 | 75.6 |
| 23 | 85.2 |
| 24 | 95.9 |
| 25 | 108.0 |
| 26 | 121.7 |
| 27 | 137.1 |
| 28 | 154.4 |
| 29 | 173.9 |
| 30 | 195.9 |
| 31 | 220.6 |
| 32 | 248.5 |
| 33 | 279.9 |
| 34 | 315.3 |
| 35 | 355.1 |
| 36 | 400.0 |
| 37 | 446.6 |
| 38 | 501.2 |
| 39 | 571.5 |
| 40 | 642.7 |
PA10 INP インポジション範囲
スクロールできます
| 機能 | 初期値 |
|---|---|
| インポジション範囲を指令パルス単位で設定してください。 [Pr. PC24] の設定でサーボモータエンコーダパルス単位に変更できます。 設定範囲: 0 ~ 65535 | 100[pulse] |
PA11 TLP 正転トルク制限/正方向推力制限
スクロールできます
| 機能 | 初期値 |
|---|---|
| サーボモータの発生トルクまたは発生推力を制限することができます。 アナログモニタ出力でトルクまたは推力を出力する場合、[Pr. PA11 正転トルク制限/正方向推力制限] および [Pr. PA12 逆転トルク制限/負方向推力制限] のうちで、大きい値のトルクまたは推力が最大出力電圧 (8 V) になります。 最大トルクまたは最大推力 = 100.0 [%] として設定してください。 サーボモータのCCW力行時,CW回生時のトルクまたはリニアサーボモータの正方向力行時、負方向回生時の推力を制限する場合に設定してください。 “0.0” に設定するとトルクまたは推力を発生しません。 設定範囲: 0.0 ~ 100.0 | 100.0[%] |
PA12 TLN 逆転トルク制限/負方向推力制限
スクロールできます
| 機能 | 初期 値 |
|---|---|
| サーボモータの発生トルクまたは発生推力を制限することができます。 アナログモニタ出力でトルクまたは推力を出力する場合、[Pr. PA11 正転トルク制限/正方向推力制限] および [Pr. PA12 逆転トルク制限/負方向推力制限] のうちで、大きい値のトルクまたは推力が最大出力電圧 (8 V) になります。 最大トルクまたは最大推力 = 100.0 [%] として設定してください。 サーボモータのCW力行時、CCW回生時のトルクまたはリニアサーボモータの負方向力行時、正方向回生時の推力を制限する場合に設定してください。 “0.0” に設定するとトルクまたは推力を発生しません。 設定範囲: 0.0 ~ 100.0 | 100.0[%] |
PA13 *PLSS 指令パルス入力形態
スクロールできます
| 設定桁 | 機能 | 初期 値 |
|---|---|---|
| _ _ _ x | 指令入力パルス列形態選択 0: 正転、逆転パルス列 1: 符号付きパルス列 2: A相、B相パルス列 (サーボアンプは,入力パルスを4逓倍して取り込みます。) | 0h |
| _ _ x _ | パルス列論理選択 0: 正論理 1: 負論理 接続するコントローラから受ける指令パルス列の論理にあわせてください。 MELSEC iQ-Rシリーズ/MELSEC-Qシリーズ/MELSEC-Lシリーズ/MELSEC-Fシリー ズの論理については3.6.1項のポイントを参照してください。 設定値については表5.3を参照してください。 | 0h |
| _ x _ _ | 指令入力パルス列フィルタ選択 指令パルス周波数に合ったフィルタを選択することで、ノイズ耐力を向上させることができます。 0: 指令入力パルス列が4 Mpulses/s以下の場合 1: 指令入力パルス列が1 Mpulse/s以下の場合 2: 指令入力パルス列が500 kpulses/s以下の場合 3: 指令入力パルス列が200 kpulses/s以下の場合 (ソフトウエアバージョンA5以降から対応) “1” は1 Mpulse/sまでの指令に対応しています。 1 Mpulse/sを超え4 Mpulses/s以下の指令を入力する場合、 “0” を設定してください。 正しい値を設定しないと、次に示す誤作動の原因になります。 ・実際の指令より高い値を設定すると、ノイズ耐力が低下します。 ・実際の指令より低い値を設定すると、位置ずれが発生します。 | 1h |
| x _ _ _ | メーカ設定用 | 0h |
指令入力パルス列形態選択
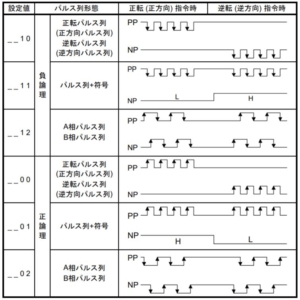
表の中の矢印はパルスを取り込むタイミングを示します。A相およびB相パルス列は4逓倍して取り込まれます。
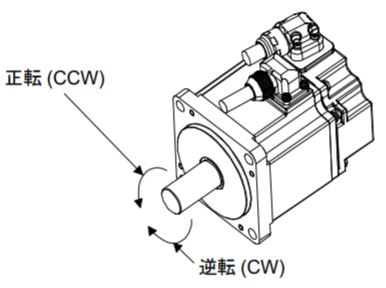
PA14 *POL 回転方向選択/移動方向選択
スクロールできます
| 機能 | 初期 値 |
|---|---|
| 回転型サーボモータ、リニアサーボモータ、およびダイレクトドライブモータの入力するパルス列に対する、サーボモータの回転方向またはリニアサーボモータの移動方向を選択してください。 設定範囲: 0、1 | 0 |
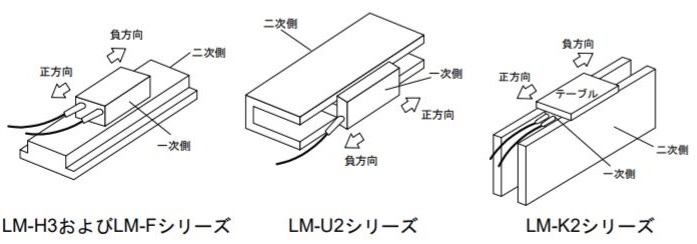
サーボモータ回転方向/リニアサーボモータ移動方向
| 設定値 | 正転パルス入力時 | 逆転パルス入力時 |
|---|---|---|
| 0 | CCWまたは正方向 | CWまたは負方向 |
| 1 | CWまたは負方向 | CCWまたは正方向 |
サーボモータの回転方向は次のとおりです。
リニアサーボモータの正方向および負方向は次のとおりです。
PA15 *ENR エンコーダ出力パルス
スクロールできます
| 機能 | 初期値 |
|---|---|
| サーボアンプが出力するエンコーダ出力パルスを1回転あたりの出力パルス数、分周比、または電子ギア比で設定してください。(4逓倍後) [Pr. PC19] の “エンコーダ出力パルス設定選択” で、”A相・B相パルス電子ギア設定(_ _ 3 _)” を選択した場合の電子ギアの分子を設定してください。 出力最大周波数は4.6 Mpulses/sです。 超えない範囲で設定してください。 設定範囲: 1 ~ 4194304 | 4000[pulse/rev] |
PA16 *ENR2 エンコーダ出力パルス2
スクロールできます
| 機能 | 初期値 |
|---|---|
| AB相パルス出力における電子ギアの分母を設定してください。 [Pr. PC19]の”エンコーダ出力パルス設定選択” で、”A相・B相パルス電子ギア設定(_ _ 3 _)”を選択した場合の電子ギアの分母を設定してください。 出力最大周波数は4.6 Mpulses/sです。 超えない範囲で設定してください。 設定範囲: 1 ~ 4194304 | 1 |
PA17 *MSR サーボモータシリーズ設定
スクロールできます
| 機能 | 初期値 |
|---|---|
| リニアサーボモータを使用する場合、[Pr. PA17] および [Pr. PA18] で使用するリニアサーボモータを選択してください。 また、[Pr. PA18] と同時に設定してください。 設定値についてはサーボモータ対応表を参照してください。 MR-J4-03A6(-RJ)サーボアンプでは、このパラメータは使用できません。 | 0000h |
サーボモータ対応表
リニアサーボモータLM-H3シリーズの場合、[Pr. PA17] の設定値は00BBh。
| リニアサーボモータ(一次側) | [Pr. PA18]の設定値 |
|---|---|
| LM-H3P2A-07P-BSS0 | 2101h |
| LM-H3P3A-12P-CSS0 | 3101h |
| LM-H3P3B-24P-CSS0 | 3201h |
| LM-H3P3C-36P-CSS0 | 3301h |
| LM-H3P3D-48P-CSS0 | 3401h |
| LM-H3P7A-24P-ASS0 | 7101h |
| LM-H3P7B-48P-ASS0 | 7201h |
| LM-H3P7C-72P-ASS0 | 7301h |
| LM-H3P7D-96P-ASS0 | 7401h |
リニアサーボモータLM-U2シリーズの場合、[Pr. PA17] の設定値は00B4h。
| リニアサーボモータ(一次側) | [Pr. PA18]の設定値 |
|---|---|
| LM-U2PAB-05M-0SS0 | A201h |
| LM-U2PAD-10M-0SS0 | A401h |
| LM-U2PAF-15M-0SS0 | A601h |
| LM-U2PBB-07M-1SS0 | B201h |
| LM-U2PBD-15M-1SS0 | B401h |
| LM-U2PBF-22M-1SS0 | 2601h |
| LM-U2P2B-40M-2SS0 | 2201h |
| LM-U2P2C-60M-2SS0 | 2301h |
| LM-U2P2D-80M-2SS0 | 2401h |
リニアサーボモータLM-Fシリーズの場合、[Pr. PA17] の設定値は00B2h。
| リニアサーボモータ(一次側) | [Pr. PA18]の設定値 |
|---|---|
| LM-FP2B-06M-1SS0 (自冷) | 2201h |
| LM-FP2D-12M-1SS0 (自冷) | 2401h |
| LM-FP2F-18M-1SS0 (自冷) | 2601h |
| LM-FP4B-12M-1SS0 (自冷) | 4201h |
| LM-FP4D-24M-1SS0 (自冷) | 4401h |
| LM-FP4F-36M-1SS0 (自冷) | 4601h |
| LM-FP4H-48M-1SS0 (自冷) | 4801h |
| LM-FP5H-60M-1SS0 (自冷) | 5801h |
| LM-FP2B-06M-1SS0 (液冷) | 2202h |
| LM-FP2D-12M-1SS0 (液冷) | 2402h |
| LM-FP2F-18M-1SS0 (液冷) | 2602h |
| LM-FP4B-12M-1SS0 (液冷) | 4202h |
| LM-FP4D-24M-1SS0 (液冷) | 4402h |
| LM-FP4F-36M-1SS0 (液冷) | 4602h |
| LM-FP4H-48M-1SS0 (液冷) | 4802h |
| LM-FP5H-60M-1SS0 (液冷) | 5802h |
リニアサーボモータLM-K2シリーズの場合、[Pr. PA17] の設定値は00B8h。
| リニアサーボモータ(一次側) | [Pr. PA18]の設定値 |
|---|---|
| LM-K2P1A-01M-2SS1 | 1101h |
| LM-K2P1C-03M-2SS1 | 1301h |
| LM-K2P2A-02M-1SS1 | 2101h |
| LM-K2P2C-07M-1SS1 | 2301h |
| LM-K2P2E-12M-1SS1 | 2501h |
| LM-K2P3C-14M-1SS1 | 3301h |
| LM-K2P3E-24M-1SS1 | 3501h |
PA18 *MTY サーボモータタイプ設定
スクロールできます
| 機能 | 初期値 |
|---|---|
| リニアサーボモータを使用する場合、[Pr. PA17] および [Pr. PA18] で使用するリニアサーボモータを選択してください。 また、[Pr. PA17] と同時に設定してください。 設定値については [Pr. PA17] のサーボモータ対応表を参照してください。 MR-J4-03A6(-RJ)サーボアンプでは、このパラメータは使用できません。 | 0000h |
PA19 *BLK パラメータ書込み禁止
スクロールできます
| 機能 | 初期値 |
|---|---|
| パラメータの参照範囲および書込み範囲を選択してください。 設定値については[Pr. PA19] の設定値と読込み/書込み範囲を参照してください。 MR-J4-03A6(-RJ)サーボアンプではリニアサーボモータ/DDモータ設定パラメータ([Pr. PL_ _ ]) は使用できません。 | 00AAh |
[Pr. PA19] の設定値と読込み/書込み範囲
スクロールできます
| PA19 | 設定値の操作 | PA | PB | PC | PD | PE | PF | PL |
|---|---|---|---|---|---|---|---|---|
| 下記以外 | 読込み | ○ | ||||||
| 下記以外 | 書込み | ○ | ||||||
| 000Ah | 読込み | 19のみ | ||||||
| 000Ah | 書込み | 19のみ | ||||||
| 000Bh | 読込み | ○ | ○ | ○ | ||||
| 000Bh | 書込み | ○ | ○ | ○ | ||||
| 000Ch | 読込み | ○ | ○ | ○ | ○ | |||
| 000Ch | 書込み | ○ | ○ | ○ | ○ | |||
| 00AAh (初期値) | 読込み | ○ | ○ | ○ | ○ | ○ | ○ | |
| 00AAh (初期値) | 書込み | ○ | ○ | ○ | ○ | ○ | ○ | |
| 00ABh | 読込み | ○ | ○ | ○ | ○ | ○ | ○ | ○ |
| 00ABh | 書込み | ○ | ○ | ○ | ○ | ○ | ○ | ○ |
| 100Bh | 読込み | ○ | ||||||
| 100Bh | 書込み | 19のみ | ||||||
| 100Ch | 読込み | ○ | ○ | ○ | ○ | |||
| 100Ch | 書込み | 19のみ | ||||||
| 10AAh | 読込み | ○ | ○ | ○ | ○ | ○ | ○ | |
| 10AAh | 書込み | 19のみ | ||||||
| 10ABh | 読込み | ○ | ○ | ○ | ○ | ○ | ○ | ○ |
| 10ABh | 書込み | 19のみ |
PA20 *TDS タフドライブ設定
電源および負荷変動の状態によっては、タフドライブ機能でアラームを回避することができない場合があります。
[Pr. PD23]~[Pr. PD26]、[Pr. PD28]および[Pr. PD47]で、CN1-22ピン~CN1-25ピン、CN1-49ピン、CN1-13ピン
およびCN1-14ピンにMTTR (タフドライブ中)を割り付けることができます。
ただし、MR-J4-03A6(-RJ) サーボアンプではMTTR (タフドライブ中) を割り付けることができません。
スクロールできます
| 設定桁 | 機能 | 初期値 |
|---|---|---|
| _ _ _ x | メーカ設定用 | 0h |
| _ _ x _ | 振動タフドライブ選択 0: 無効 1: 有効 この桁で “1” を選択すると、[Pr. PF23] で設定した発振レベルを超えたときに、自動的に [Pr. PB13 機械共振抑制フィルタ1]、[Pr. PB15 機械共振抑制フィルタ2] の設定値を変更し、振動を抑制します。 発振検知アラームを警告出力にする場合、[Pr. PF24 振動タフドライブ機能選択] で変更することができます。 | 0h |
| _ x _ _ | SEMI-F47機能選択 0: 無効 1: 有効 この桁で “1” を選択すると、運転中に瞬時停電が発生した場合でもコンデンサに充電されている電気エネルギを使用して [AL. 10 不足電圧] の発生を回避することができます。 [Pr. PF25 SEMI-F47機能 瞬停検出時間] で [AL. 10.1 制御回路電源電圧低下] が発生するまでの時間を設定することができます。 MR-J4-03A6(-RJ)サーボアンプの場合,この桁は初期値以外の設定では使用できません。 | 0h |
| x _ _ _ | メーカ設定用 | 0h |
PA21 *AOP3 機能選択A-3
スクロールできます
| 設定桁 | 機能 | 初期 値 |
|---|---|---|
| _ _ _ x | ワンタッチ調整機能選択 0: 無効 1: 有効 この桁が “0” の場合,ワンタッチ調整は実行できません。 | 1h |
| _ _ x _ | メーカ設定用 | 0h |
| _ x _ _ | メーカ設定用 | 0h |
| x _ _ _ | 電子ギア選択 0: 電子ギア ([Pr. PA06] および [Pr. PA07]) 1: 1回転あたりの指令入力パルス数 ([Pr. PA05]) 2: J3電子ギア設定値互換モード(電子ギア ([Pr. PA06] および [Pr. PA07] × 16)) この設定値は,HF/HC/HAシリーズサーボモータ (262144 pulses/rev) からHGシリーズサーボモータ(4194304 pulses/rev)に置き換える場合に使用してください。この桁を “2” に設定すると,MR-J3サーボアンプで設定していた電子ギアの設定値が使用できます。 3: J2S電子ギア設定値互換モード (電子ギア ([Pr. PA06] および [Pr. PA07] × 32)) この設定値は,HC/HAシリーズサーボモータ (131072 pulses/rev) からHGシリーズサーボモータ(4194304 pulses/rev)に置き換える場合に使用してください。 この桁を “3” に設定すると,MR-J2Sサーボアンプで設定していた電子ギアの設定値が使用できます。 (ソフトウエアバージョンB3以降から対応) MR-J4-03A6(-RJ)サーボアンプでは,この桁に “2” および “3” は選択できません。 | 0h |
PA22 *PCS 位置制御構成選択
スクロールできます
| 設定桁 | 機能 | 初期 値 |
|---|---|---|
| _ _ _ x | メーカ設定用 | 0h |
| _ _ x _ | スーパートレース制御選択 0: 無効 2: 有効 この桁はソフトウエアバージョンB4以降のサーボアンプで使用できます。 | 0h |
| _ x _ _ | メーカ設定用 | 0h |
| x _ _ _ | メーカ設定用 | 0h |
PA23 DRATドライブレコーダ任意アラームトリガ設定
スクロールできます
| 設定桁 | 機能 | 初期 値 |
|---|---|---|
| _ _ x x | アラーム詳細番号設定 ドライブレコーダ機能において、任意アラーム詳細番号でトリガを実施したいときに設定してください。 この桁が “0 0” の場合、任意アラーム番号設定のみが有効になります。 | 00h |
| x x _ _ | アラーム番号設定 ドライブレコーダ機能で、任意アラーム番号でトリガを実施したいときに設定してください。 “0 0” を選択した場合、ドライブレコーダの任意アラームトリガは無効になります。 | 00h |
設定例
- [AL. 50 過負荷1] が発生するときにドライブレコーダを起動したい場合、このパラメータを “5 0 0 0” に設定してください。
- [AL. 50.3 運転時過負荷サーマル異常4] が発生するときにドライブレコーダを起動したい場合、このパラメータを “5 0 0 3” に設定してください。
PA24 AOP4 機能選択A-4
スクロールできます
| 設定桁 | 機能 | 初期 値 |
|---|---|---|
| _ _ _ x | 振動抑制モード選択 0: 標準モード 1: 3慣性モード 2: 低応答モード 標準モード、低応答モードを選択した場合、制振制御2は使用できません。 3慣性モードを選択した場合、フィードフォワードゲインは使用できません。 3慣性モードおよび低応答モードで制御モード切換えを行う場合、停止状態で切り換えてください。 | 0h |
| _ _ x _ | メーカ設定用 | 0h |
| _ x _ _ | メーカ設定用 | 0h |
| x _ _ _ | メーカ設定用 | 0h |
PA25 OTHOV ワンタッチ調整オーバシュート許容レベル
スクロールできます
| 機能 | 初期値 |
|---|---|
| ワンタッチで調整するオーバシュート量の許容値をインポジション範囲に対する[%] で設定してください。 ただし、”0″ を設定すると50%になります。 設定範囲: 0 ~ 100 | 0[%] |
PA26 *AOP5 機能選択A-5
スクロールできます
| 設定桁 | 機能 | 初期 値 |
|---|---|---|
| _ _ _ x | 瞬停時トルク制限機能選択 (瞬停タフドライブ選択) 0: 無効 1: 有効 運転中に瞬時停電が発生した場合、加速時トルクを制限することでサーボアンプ内のコンデンサに充電された電気エネルギの消費を抑え、瞬停タフドライブ機能で[AL. 10.2 主回路電源電圧低下] が発生するまでの時間を延ばすことができます。 これにより、[Pr. PF25 SEMI-F47機能 瞬停検出時間]をより長く設定することができます。 瞬停時トルク制限機能は[Pr. PA20]の”SEMI-F47機能選択”で”有効 (_ 1 _ _)”を選択したときに使用可能になります。 この桁はソフトウエアバージョンA6以降のサーボアンプで使用できます。 MR-J4-03A6(-RJ)サーボアンプの場合、この桁は初期値以外の設定では使用できません。 | 0h |
| _ _ x _ | メーカ設定用 | 0h |
| _ x _ _ | メーカ設定用 | 0h |
| x _ _ _ | メーカ設定用 | 0h |
コメント