三菱電機製サーボアンプMR-J4シリーズのゲイン・フィルタ設定パラメータ詳細です。
ゲイン・フィルタ設定パラメータ ([Pr. PB_ _ ])
PB01 FILT アダプティブチューニングモード (アダプティブフィルタⅡ)
| 設定桁 | 機能 | 初期 値 [単位] |
|---|---|---|
| _ _ _ x | フィルタチューニングモード選択 アダプティブチューニングの設定を行います。 機械共振抑制フィルタ1の調整モードを選択してください。 0: 無効 1: 自動設定 (トルク制御の場合,自動設定は使用しないでください。) 2: マニュアル設定 | 0h |
| _ _ x _ | メーカ設定用 | 0h |
| _ x _ _ | メーカ設定用 | 0h |
| x _ _ _ | チューニング精度選択 0: 標準 1: 高精度 高精度モードは標準モードに対して周波数推定精度は高くなりますが、調整時の音が大きくなる場合があります。 この桁はソフトウエアバージョンC5以降のサーボアンプで使用できます。 | 0h |
PB02 VRFT 制振制御チューニングモード (アドバンスト制振制御Ⅱ)
| 設定桁 | 機能 | 初期値 |
|---|---|---|
| _ _ _ x | 制振制御1チューニングモード選択 制振制御1のチューニングモードを選択してください。 0: 無効 1: 自動設定 2: マニュアル設定 | 0h |
| _ _ x _ | 制振制御2チューニングモード選択 制振制御2のチューニングモードを選択してください。 [Pr. PA24] の “振動抑制モード選択” で “3慣性モード (_ _ _ 1)” を選択すると、この桁の設定値が有効になります。 0: 無効 1: 自動設定 2: マニュアル設定 | 0h |
| _ x _ _ | メーカ設定用 | 0h |
| x _ _ _ | メーカ設定用 | 0h |
PB03 PST 位置指令加減速時定数 (位置スムージング)
| 設定桁 | 機能 | 初期値 |
|---|---|---|
| _ _ _ x | 制振制御1チューニングモード選択 制振制御1のチューニングモードを選択してください。 0: 無効 1: 自動設定 2: マニュアル設定 | 0h |
| _ _ x _ | 制振制御2チューニングモード選択 制振制御2のチューニングモードを選択してください。 [Pr. PA24] の “振動抑制モード選択” で “3慣性モード (_ _ _ 1)” を選択すると、この桁の設定値が有効になります。 0: 無効 1: 自動設定 2: マニュアル設定 | 0h |
| _ x _ _ | メーカ設定用 | 0h |
| x _ _ _ | メーカ設定用 | 0h |
PB03 PST 位置指令加減速時定数 (位置スムージング)
| 機能 | 初期値 |
|---|---|
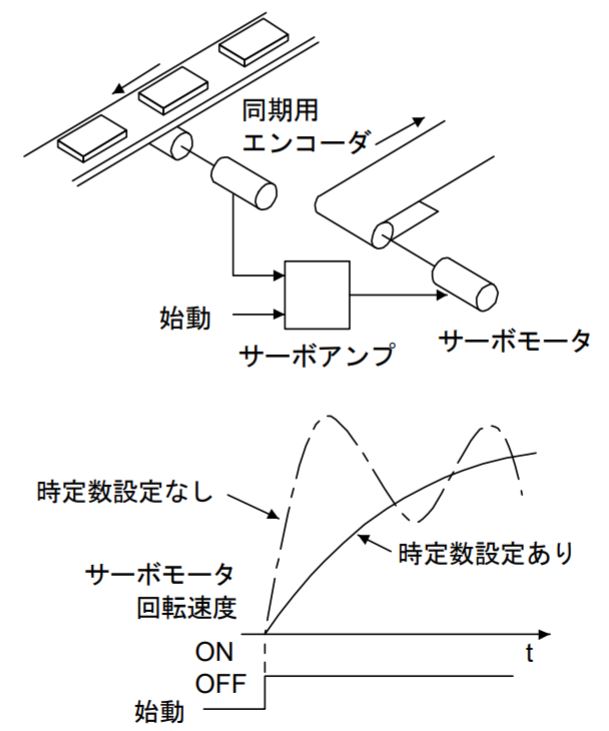
| 位置指令に対する一次遅れフィルタの定数を設定してください。 [Pr. PB25] の “位置加減速フィルタ方式選択” で “一次遅れ” または “直線加減速” の制御方式を選択できます。直線加減速選択時の設定範囲は,0 ms ~ 10 msになります。 10 ms以上の値を設定すると設定値は10 msと認識します。 直線加減速選択時は,”制御モード選択” ([Pr. PA01]) を “_ _ _ 0” 以外に変更しないでください。 位置制御モード切換え時に,サーボモータまたはリニアサーボモータが急停止します。 設定範囲: 0 ~ 65535 (例) 同期用エンコーダなどから指令する場合,ライン運転中に始動してもスムーズに同期運転に入ることができます。 | 0[ms] |
PB04 FFC フィードフォワードゲイン
| 機能 | 初期値 |
|---|---|
| フィードフォワードゲインを設定してください。 100%を設定して定速運転を実施すると、溜りパルスがほぼ0になります。 スーパートレース制御が有効の場合、定速および等加減速の溜りパルスもほぼ0になります。 ただし、急加減速を行うとオーバシュートが大きくなります。 目安として、フィードフォワードゲインを100%に設定した場合、定格速度までの加速時定数を1s以上にしてください。 設定範囲: 0 ~ 100 | 0[%] |
PB06 GD2 負荷慣性モーメント比/負荷質量比
| 機能 | 初期値 |
|---|---|
| サーボモータに対する負荷慣性モーメント比または負荷質量比を設定してください。 実際の負荷慣性モーメントまたは負荷質量に対して大きく異なる値が設定されていると、オーバシュートなど予期しない動きになる場合があります。 [Pr. PA08] の設定値によってこのパラメータが自動設定またはマニュアル設定になります。 詳細については次の表を参照してください。 このパラメータが自動設定の場合、0.00 ~ 100.00で変化します。 設定範囲: 0.00 ~ 300.00 | 7.00[倍] |
設定選択一覧表
| Pr. PA08 | Pr.PB06の状態 |
|---|---|
| _ _ _ 0 (2ゲイン調整モード1 (補間モード)) | 自動設定 |
| _ _ _ 1 (オートチューニングモード1) | 自動設定 |
| _ _ _ 2 (オートチューニングモード2) | マニュアル設定 |
| _ _ _ 3 (マニュアルモード) | マニュアル設定 |
| _ _ _ 4 (2ゲイン調整モード2) | マニュアル設定 |
PB07 PG1 モデル制御ゲイン
| 機能 | 初期値 |
|---|---|
| 目標位置までの応答ゲインを設定してください。 設定値を大きくすると位置指令に対する追従性は向上しますが、大きくしすぎると、振動および音が発生しやすくなります。 制振制御チューニングモードの場合、[Pr. PB07] の設定範囲に制限があります。 [Pr. PA08] の設定値によってこのパラメータが自動設定またはマニュアル設定になります。 詳細については次の表を参照してください。 設定範囲: 1.0 ~ 2000.0 | 15.0[rad/s] |
設定選択一覧表
| Pr. PA08 | Pr.PB07の状態 |
|---|---|
| _ _ _ 0 (2ゲイン調整モード1 (補間モード)) | マニュアル設定 |
| _ _ _ 1 (オートチューニングモード1) | 自動設定 |
| _ _ _ 2 (オートチューニングモード2) | 自動設定 |
| _ _ _ 3 (マニュアルモード) | マニュアル設定 |
| _ _ _ 4 (2ゲイン調整モード2) | マニュアル設定 |
PB08 PG2 位置制御ゲイン
| 機能 | 初期値 |
|---|---|
| 位置ループのゲインを設定してください。 負荷外乱に対する位置応答性を上げるときに設定してください。 設定値を大きくすると負荷外乱に対する応答は向上しますが、大きくしすぎると、振動および音が発生しやすくなります。 [Pr. PA08] の設定値によってこのパラメータが自動設定またはマニュアル設定になります。 詳細については次の表を参照してください。 設定範囲: 1.0 ~ 2000.0 | 37.0[rad/s] |
設定選択一覧表
| Pr. PA08 | Pr.PB07の状態 |
|---|---|
| _ _ _ 0 (2ゲイン調整モード1 (補間モード)) | 自動設定 |
| _ _ _ 1 (オートチューニングモード1) | 自動設定 |
| _ _ _ 2 (オートチューニングモード2) | 自動設定 |
| _ _ _ 3 (マニュアルモード) | マニュアル設定 |
| _ _ _ 4 (2ゲイン調整モード2) | 自動設定 |
PB09 VG2 速度制御ゲイン
| 機能 | 初期値 |
|---|---|
| 速度ループのゲインを設定してください。 低剛性の機械、バックラッシュの大きい機械などで振動が発生するときに設定してください。 設定値を大きくすると応答性は向上しますが、大きくしすぎると振動および音が発生しやすくなります。 [Pr. PA08] の設定値によってこのパラメータが自動設定またはマニュアル設定になります。 詳細については [Pr. PB08] の表を参照してください。 設定範囲: 20 ~ 65535 | 823[rad/s] |
PB10 VIC 速度積分補償
| 機能 | 初期値 |
|---|---|
| 速度ループの積分時定数を設定してください。 設定値を小さくすると応答性は向上しますが、振動および音が発生しやすくなります。 [Pr. PA08] の設定値によってこのパラメータが自動設定またはマニュアル設定になります。 詳細については [Pr. PB08] の表を参照してください。 設定範囲: 0.1 ~ 1000.0 | 33.7[ms] |
PB11 VDC 速度微分補償
| 機能 | 初期値 |
|---|---|
| 微分補償を設定してください。 PC (比例制御) をオンにすると有効になります。 設定範囲: 0 ~ 1000 | 980 |
PB12 OVA オーバシュート量補正
| 機能 | 初期値 |
|---|---|
| サーボモータ定格回転速度時の定格トルクに対する動摩擦トルクを%単位で設定してください。 または、リニアサーボモータ定格速度時の連続推力に対する動摩擦力を%単位で設定してください。 ただし、応答性が低い場合、またはトルク制限状態または推力制限状態にある場合、このパラメータの効果が下がることがあります。 設定範囲: 0 ~ 100 | 0[%] |
PB13 NH1 機械共振抑制フィルタ1
| 機能 | 初期値 |
|---|---|
| 機械共振抑制フィルタ1のノッチ周波数を設定してください。 [Pr. PB01] の “フィルタチューニングモード選択” で “自動設定 (_ _ _ 1)” を選択した場合、アダプティブチューニングの調整結果が反映されます。 [Pr. PB01] の “フィルタチューニングモード選択” で “マニュアル設定 (_ _ _ 2)” を選択した場合、この設定値が有効になります。 設定範囲: 10 ~ 4500 | 4500[Hz] |
PB14 NHQ1 ノッチ形状選択1
機械共振抑制フィルタ1の形状を設定してください。
[Pr. PB01] の “フィルタチューニングモード選択” で “自動設定 (_ _ _ 1)” を選択した場合,アダプティブチューニン
グの調整結果が反映されます。
マニュアル設定を選択した場合,このパラメータの設定値が有効になります。
| 設定桁 | 機能 | 初期値 |
|---|---|---|
| _ _ _ x | メーカ設定用 | 0h |
| _ _ x _ | ノッチ深さ選択 0: -40 dB 1: -14 dB 2: -8 dB 3: -4 dB | 0h |
| _ x _ _ | ノッチ広さ選択 0: α = 2 1: α = 3 2: α = 4 3: α = 5 | 0h |
| x _ _ _ | メーカ設定用 | 0h |
PB15 NH2 機械共振抑制フィルタ2
| 機能 | 初期値 |
|---|---|
| 機械共振抑制フィルタ2のノッチ周波数を設定してください。 [Pr. PB16] の “機械共振抑制フィルタ2選択” で “有効 (_ _ _ 1)” を選択すると、このパラメータの設定値が有効になります。 設定範囲: 10 ~ 4500 | 4500[Hz] |
PB16 NHQ2 ノッチ形状選択2
機機械共振抑制フィルタ2の形状を設定してください。
| 設定桁 | 機能 | 初期値 |
|---|---|---|
| _ _ _ x | 機械共振抑制フィルタ2選択 0: 無効 1: 有効 | 0h |
| _ _ x _ | ノッチ深さ選択 0: -40 dB 1: -14 dB 2: -8 dB 3: -4 dB | 0h |
| _ x _ _ | ノッチ広さ選択 0: α = 2 1: α = 3 2: α = 4 3: α = 5 | 0h |
| x _ _ _ | メーカ設定用 | 0h |
PB17 NHF 軸共振抑制フィルタ
軸共振抑制フィルタを設定してください。
高周波の機械振動を抑制するときに使用してください。
[Pr. PB23] の “軸共振抑制フィルタ選択” で “自動設定 ( _ _ _ 0 )” を選択した場合、使用するサーボモータと負荷慣性モーメント比より自動計算されます。
リニアサーボモータを使用時には自動設定されません。
“マニュアル設定 ( _ _ _ 1 )” を選択した場合,このパラメータに書き込んだ値を使用します。
[Pr. PB23] の “軸共振抑制フィルタ選択” で “無効 ( _ _ _ 2 )” を選択した場合、この設定値は無効になります。
[Pr. PB49] の “機械共振抑制フィルタ4選択” で “有効 ( _ _ _ 1 )” を選択した場合、軸共振抑制フィルタは使用できません。
| 設定桁 | 機能 | 初期値 |
|---|---|---|
| _ _ x x | 軸共振抑制フィルタ設定周波数選択 設定値については軸共振抑制フィルタ設定周波数選択表を参照してください。 設定したい周波数に近い周波数を設定してください。 | 0h |
| _ x _ _ | ノッチ深さ選択 0: -40 dB 1: -14 dB 2: -8 dB 3: -4 dB | 0h |
| x _ _ _ | メーカ設定用 | 0h |
軸共振抑制フィルタ設定周波数選択
| 設定値 | 周波数[Hz] |
|---|---|
| _ _ 0 0 | 無効 |
| _ _ 0 1 | 無効 |
| _ _ 0 2 | 4500 |
| _ _ 0 3 | 3000 |
| _ _ 0 4 | 2250 |
| _ _ 0 5 | 1800 |
| _ _ 0 6 | 1500 |
| _ _ 0 7 | 1285 |
| _ _ 0 8 | 1125 |
| _ _ 0 9 | 1000 |
| _ _ 0 A | 900 |
| _ _ 0 B | 818 |
| _ _ 0 C | 750 |
| _ _ 0 D | 692 |
| _ _ 0 E | 642 |
| _ _ 0 F | 600 |
| _ _ 1 0 | 562 |
| _ _ 1 1 | 529 |
| _ _ 1 2 | 500 |
| _ _ 1 3 | 473 |
| _ _ 1 4 | 450 |
| _ _ 1 5 | 428 |
| _ _ 1 6 | 409 |
| _ _ 1 7 | 391 |
| _ _ 1 8 | 375 |
| _ _ 1 9 | 360 |
| _ _ 1 A | 346 |
| _ _ 1 B | 333 |
| _ _ 1 C | 321 |
| _ _ 1 D | 310 |
| _ _ 1 E | 300 |
| _ _ 1 F | 290 |
PB18 LPF ローパスフィルタ設定
| 機能 | 初期値 |
|---|---|
| ローパスフィルタの設定をしてください。 関連するパラメータの設定値とこのパラメータの状態については次の表を参照してください。 設定範囲: 100 ~ 18000 | 3141[rad/s] |
ローパスフィルタ自動設定対応表
| [Pr. PB23] | [Pr. PB18] |
|---|---|
| _ _ 0 _ (初期値) | 自動設定 |
| _ _ 1 _ | 設定値有効 |
| _ _ 2 _ | 設定値無効 |
PB19 VRF11 制振制御1 振動周波数設定
| 機能 | 初期値 |
|---|---|
| 低周波の機械振動を抑制する制振制御1の振動周波数を設定してください。 [Pr. PB02] の “制振制御1チューニングモード選択” で “自動設定 (_ _ _ 1)” を選択した場合、このパラメータは自動設定されます。 “マニュアル設定 (_ _ _ 2)” を選択した場合、このパラメータに書き込んだ値を使用します。 [Pr. PB07] の値によってこのパラメータの設定範囲が変わります。 設定範囲外の値を設定した場合、制振制御が無効になります。 設定範囲: 0.1 ~ 300.0 | 100.0[Hz] |
PB20 VRF12 制振制御1 共振周波数設定
| 機能 | 初期値 |
|---|---|
| 低周波の機械振動を抑制する制振制御1の共振周波数を設定してください。 [Pr. PB02] の “制振制御1チューニングモード選択” で “自動設定 (_ _ _ 1)” を選択した場合、このパラメータは自動設定されます。 “マニュアル設定 (_ _ _ 2)” を選択した場合、このパラメータに書き込んだ値を使用します。 [Pr. PB07] の値によって、このパラメータの設定範囲が変わります。 設定範囲外の値を設定した場合、制振制御が無効になります。 設定範囲: 0.1 ~ 300.0 | 100.0[Hz] |
PB21 VRF13 制振制御1 振動周波数ダンピング設定
| 機能 | 初期値 |
|---|---|
| 低周波の機械振動を抑制する制振制御1の振動周波数のダンピングを設定してください。 [Pr. PB02] の “制振制御1チューニングモード選択” で “自動設定 (_ _ _ 1)” を選択した場合、このパラメータは自動設定されます。 “マニュアル設定 (_ _ _ 2)” を選択した場合、このパラメータに書き込んだ値を使用します。 設定範囲: 0.00 ~ 0.30 | 0.00 |
PB22 VRF14 制振制御1 共振周波数ダンピング設定
| 機能 | 初期値 |
|---|---|
| 低周波の機械振動を抑制する制振制御1の共振周波数のダンピングを設定してください。 [Pr. PB02] の “制振制御1チューニングモード選択” で “自動設定 (_ _ _ 1)” を選択した場合、このパラメータは自動設定されます。 “マニュアル設定 (_ _ _ 2)” を選択した場合、このパラメータに書き込んだ値を使用します。 設定範囲: 0.00 ~ 0.30 | 0.00 |
PB23 VFBF ローパスフィルタ選択
| 設定桁 | 機能 | 初期値 |
|---|---|---|
| _ _ _ x | 軸共振抑制フィルタ選択 軸共振抑制フィルタを選択してください。 0: 自動設定 1: マニュアル設定 2: 無効 [Pr. PB49] の “機械共振抑制フィルタ4選択” で “有効 (_ _ _ 1)” を選択した場合、軸共振抑制フィルタは使用できません。 | 0h |
| _ _ x _ | ローパスフィルタ選択 ローパスフィルタを選択してください。 0: 自動設定 1: マニュアル設定 2: 無効 | 0h |
| _ x _ _ | メーカ設定用 | 0h |
| x _ _ _ | メーカ設定用 | 0h |
PB24 *MVS 微振動抑制制御
| 設定桁 | 機能 | 初期値 |
|---|---|---|
| _ _ _ x | 微振動抑制制御を選択してください。 0: 無効 1: 有効 微振動抑制制御は,[Pr. PA08] の “ゲイン調整モード選択” で “マニュアルモード (_ _ _ 3)” を選択すると有効になります。 微振動抑制制御選択は速度制御モードでは使用できません。 | 0h |
| _ _ x _ | メーカ設定用 | 0h |
| _ x _ _ | メーカ設定用 | 0h |
| x _ _ _ | メーカ設定用 | 0h |
PB26 *CDP ゲイン切換え機能
ゲイン切換え条件を選択してください。
[Pr. PB29] ~ [Pr. PB36] および [Pr. PB56] ~ [Pr. PB60] で設定したゲイン切換え値を有効にする条件を設定してくだ
さい。
| 設定桁 | 機能 | 初期値 |
|---|---|---|
| _ _ _ x | ゲイン切換え選択 0: 無効 1: 入力デバイス (CDP (ゲイン切換え)) 2: 指令周波数 3: 溜りパルス 4: サーボモータ回転速度/リニアサーボモータ速度 | 0h |
| _ _ x _ | ゲイン切換え条件選択 0: 切換え条件以上で切換え後ゲイン有効 1: 切換え条件以下で切換え後ゲイン有効 | 0h |
| _ x _ _ | ゲイン切換え時定数無効条件選択 0: 切換え時定数有効 1: 切換え時時定数無効 2: 復帰時時定数無効 この桁はソフトウエアバージョンB4以降のサーボアンプで使用できます。 | 0h |
| x _ _ _ | メーカ設定用 | 0h |
PB27 CDL ゲイン切換え条件
| 機能 | 初期値 |
|---|---|
| [Pr. PB26] で選択したゲイン切換え (指令周波数・溜りパルス・サーボモータ回転速度/リニアサーボモータ速度) の値を設定してください。 設定値の単位は切換え条件の項目により異なります。 リニアサーボモータの場合、単位のr/minはmm/sになります。 設定範囲: 0 ~ 9999 | 10 [kpulse/s]/ [pulse]/ [r/min] |
PB28 CDT ゲイン切換え時定数
| 機能 | 初期値 |
|---|---|
| [Pr. PB26] および [Pr. PB27] で設定した条件に対してゲインが切り換わるまでの時定数を設定してください。 設定範囲: 0 ~ 100 | 1[ms] |
PB29 GD2B ゲイン切換え負荷慣性モーメント比/負荷質量比
| 機能 | 初期値 |
|---|---|
| ゲイン切換え有効時の負荷慣性モーメント比または負荷質量比を設定してくだい。 [Pr. PA08] の “ゲイン調整モード選択” で “マニュアルモード (_ _ _ 3)” を選択したときにのみ有効になります。 設定範囲: 0.00 ~ 300.00 | 7.00[倍] |
PB30 PG2B ゲイン切換え位置制御ゲイン
| 機能 | 初期値 |
|---|---|
| ゲイン切換え有効時の負荷慣性モーメント比または負荷質量比を設定してくだい。 [Pr. PA08] の “ゲイン調整モード選択” で “マニュアルモード (_ _ _ 3)” を選択したときにのみ有効になります。 設定範囲: 0.00 ~ 300.00 | 7.00[倍] |
PB31 VG2B ゲイン切換え速度制御ゲイン
| 機能 | 初期値 |
|---|---|
| ゲイン切換え有効時の速度制御ゲインを設定してください。 20 rad/s未満を設定した場合、[Pr. PB09] の設定値と同じ値になります。 [Pr. PA08] の “ゲイン調整モード選択” で “マニュアルモード (_ _ _ 3)” を選択したときにのみ有効になります。 設定範囲: 0 ~ 65535 | 0[rad/s] |
PB32 VICB ゲイン切換え速度積分補償
| 機能 | 初期値 |
|---|---|
| ゲイン切換え有効時の速度積分補償を設定してください。 0.1 ms未満を設定した場合、[Pr. PB10] の設定値と同じ値になります。 [Pr. PA08] の “ゲイン調整モード選択” で “マニュアルモード (_ _ _ 3)” を選択したときにのみ有効になります。 設定範囲: 0.0 ~ 5000.0 | 0.0[ms] |
PB33 VRF1B ゲイン切換え制振制御1 振動周波数設定
| 機能 | 初期値 |
|---|---|
| ゲイン切換え有効時の制振制御1の振動周波数を設定してください。 0.1 Hz未満を設定した場合,[Pr. PB19] の設定値と同じ値になります。 次の条件のときにのみ有効になります。 [Pr. PA08] の “ゲイン調整モード選択” で “マニュアルモード (_ _ _ 3)” を選択した。 [Pr. PB02] の “制振制御1チューニングモード選択” で “マニュアル設定 (_ _ _ 2)”を選択した。 [Pr. PB26] の “ゲイン切換え選択” で “入力デバイス (CDP (ゲイン切換え)) (_ _ _ 1)” を選択した。 運転中に切り換えるとショックが発生する場合があります。 必ずサーボモータまたはリニアサーボモータが停止してから切り換えてください。 設定範囲: 0.0 ~ 300.0 | 0.0[Hz] |
PB34 VRF2B ゲイン切換え制振制御1 共振周波数設定
| 機能 | 初期値 |
|---|---|
| ゲイン切換え有効時の制振制御1の共振周波数を設定してください。 0.1 Hz未満を設定した場合,[Pr. PB20] の設定値と同じ値になります。 次の条件のときにのみ有効になります。 ・[Pr. PA08] の “ゲイン調整モード選択” で “マニュアルモード (_ _ _ 3)” を選択した。 ・[Pr. PB02] の “制振制御1チューニングモード選択” で “マニュアル設定 (_ _ _ 2)”を選択した。 ・[Pr. PB26] の “ゲイン切換え選択” で “入力デバイス (CDP (ゲイン切換え)) (_ _ _ 1)” を選択した。 運転中に切り換えるとショックが発生する場合があります。 必ずサーボモータまたはリニアサーボモータが停止してから切り換えてください。 設定範囲: 0.0 ~ 300.0 | 0.0[Hz] |
PB35 VRF3B ゲイン切換え制振制御1 振動周波数ダンピング設定
| 機能 | 初期値 |
|---|---|
| ゲイン切換え有効時の制振制御1の振動周波数ダンピングを設定してください。 次の条件のときにのみ有効になります。 ・[Pr. PA08] の “ゲイン調整モード選択” で “マニュアルモード (_ _ _ 3)” を選択した。 ・[Pr. PB02] の “制振制御1チューニングモード選択” で “マニュアル設定 (_ _ _ 2)”を選択した。 ・[Pr. PB26] の “ゲイン切換え選択” で “入力デバイス (CDP (ゲイン切換え)) (_ _ _ 1)” を選択した。 運転中に切り換えるとショックが発生する場合があります。 必ずサーボモータまたはリニアサーボモータが停止してから切り換えてください。 設定範囲: 0.00 ~ 0.30 | 0.00 |
PB36 VRF4B ゲイン切換え制振制御1 共振周波数ダンピング設定
| 機能 | 初期値 |
|---|---|
| ゲイン切換え有効時の制振制御1の共振周波数ダンピングを設定してください。 次の条件のときにのみ有効になります。 ・[Pr. PA08] の “ゲイン調整モード選択” で “マニュアルモード (_ _ _ 3)” を選択した。 ・[Pr. PB02] の “制振制御1チューニングモード選択” で “マニュアル設定 (_ _ _ 2)”を選択した。 ・[Pr. PB26] の “ゲイン切換え選択” で “入力デバイス (CDP (ゲイン切換え)) (_ _ _ 1)” を選択した。 運転中に切り換えるとショックが発生する場合があります。 必ずサーボモータまたはリニアサーボモータが停止してから切り換えてください。 設定範囲: 0.00 ~ 0.30 | 0.00 |
PB45 CNHF 指令ノッチフィルタ
指令ノッチフィルタを設定してください。
| 設定桁 | 機能 | 初期値 |
|---|---|---|
| _ _ x x | 指令ノッチフィルタ設定周波数選択 設定値と周波数の関係については指令ノッチフィルタ設定周波数選択表を参照してください。 | 00h |
| _ x _ _ | ノッチ深さ選択 詳細についてはノッチ深さ選択表を参照してください。 | 0h |
| x _ _ _ | メーカ設定用 | 0h |
指令ノッチフィルタ設定周波数選択
| 設定値 | 周波数[Hz] |
|---|---|
| _ _ 0 0 | 無効 |
| _ _ 0 1 | 2250 |
| _ _ 0 2 | 1125 |
| _ _ 0 3 | 750 |
| _ _ 0 4 | 562 |
| _ _ 0 5 | 450 |
| _ _ 0 6 | 375 |
| _ _ 0 7 | 321 |
| _ _ 0 8 | 281 |
| _ _ 0 9 | 250 |
| _ _ 0 A | 225 |
| _ _ 0 B | 204 |
| _ _ 0 C | 187 |
| _ _ 0 D | 173 |
| _ _ 0 E | 160 |
| _ _ 0 F | 150 |
| _ _ 1 0 | 140 |
| _ _ 1 1 | 132 |
| _ _ 1 2 | 125 |
| _ _ 1 3 | 118 |
| _ _ 1 4 | 112 |
| _ _ 1 5 | 107 |
| _ _ 1 6 | 102 |
| _ _ 1 7 | 97 |
| _ _ 1 8 | 93 |
| _ _ 1 9 | 90 |
| _ _ 1 A | 86 |
| _ _ 1 B | 83 |
| _ _ 1 C | 80 |
| _ _ 1 D | 77 |
| _ _ 1 E | 75 |
| _ _ 1 F | 72 |
| _ _ 2 0 | 70 |
| _ _ 2 1 | 66 |
| _ _ 2 2 | 62 |
| _ _ 2 3 | 59 |
| _ _ 2 4 | 56 |
| _ _ 2 5 | 53 |
| _ _ 2 6 | 51 |
| _ _ 2 7 | 48 |
| _ _ 2 8 | 46 |
| _ _ 2 9 | 45 |
| _ _ 2 A | 43 |
| _ _ 2 B | 41 |
| _ _ 2 C | 40 |
| _ _ 2 D | 38 |
| _ _ 2 E | 37 |
| _ _ 2 F | 36 |
| _ _ 3 0 | 35.2 |
| _ _ 3 1 | 33.1 |
| _ _ 3 2 | 31.3 |
| _ _ 3 3 | 29.6 |
| _ _ 3 4 | 28.1 |
| _ _ 3 5 | 26.8 |
| _ _ 3 6 | 25.6 |
| _ _ 3 7 | 24.5 |
| _ _ 3 8 | 23.4 |
| _ _ 3 9 | 22.5 |
| _ _ 3 A | 21.6 |
| _ _ 3 B | 20.8 |
| _ _ 3 C | 20.1 |
| _ _ 3 D | 19.4 |
| _ _ 3 E | 18.8 |
| _ _ 3 F | 18.2 |
| _ _ 4 0 | 17.6 |
| _ _ 4 1 | 16.5 |
| _ _ 4 2 | 15.6 |
| _ _ 4 3 | 14.8 |
| _ _ 4 4 | 14.1 |
| _ _ 4 5 | 13.4 |
| _ _ 4 6 | 12.8 |
| _ _ 4 7 | 12.2 |
| _ _ 4 8 | 11.7 |
| _ _ 4 9 | 11.3 |
| _ _ 4 A | 10.8 |
| _ _ 4 B | 10.4 |
| _ _ 4 C | 10 |
| _ _ 4 D | 9.7 |
| _ _ 4 E | 9.4 |
| _ _ 4 F | 9.1 |
| _ _ 5 0 | 8.8 |
| _ _ 5 1 | 8.3 |
| _ _ 5 2 | 7.8 |
| _ _ 5 3 | 7.4 |
| _ _ 5 4 | 7.0 |
| _ _ 5 5 | 6.7 |
| _ _ 5 6 | 6.4 |
| _ _ 5 7 | 6.1 |
| _ _ 5 8 | 5.9 |
| _ _ 5 9 | 5.6 |
| _ _ 5 A | 5.4 |
| _ _ 5 B | 5.2 |
| _ _ 5 C | 5.0 |
| _ _ 5 D | 4.9 |
| _ _ 5 E | 4.7 |
| _ _ 5 F | 4.5 |
ノッチ深さ選択
| 設定値 | 深さ [dB] |
|---|---|
| _ 0 _ _ | -40.0 |
| _ 1 _ _ | -24.1 |
| _ 2 _ _ | -18.1 |
| _ 3 _ _ | -14.5 |
| _ 4 _ _ | -12.0 |
| _ 5 _ _ | -10.1 |
| _ 6 _ _ | -8.5 |
| _ 7 _ _ | -7.2 |
| _ 8 _ _ | -6.0 |
| _ 9 _ _ | -5.0 |
| _ A _ _ | -4.1 |
| _ B _ _ | -3.3 |
| _ C _ _ | -2.5 |
| _ D _ _ | -1.8 |
| _ E _ _ | -1.2 |
| _ F _ _ | -0.6 |
PB46 NH3 機械共振抑制フィルタ3
| 機能 | 初期値 |
|---|---|
| 機械共振抑制フィルタ3のノッチ周波数を設定してください。 [Pr. PB47] の “機械共振抑制フィルタ3選択” で “有効 (_ _ _ 1)” を選択したとき、このパラメータの設定値が有効になります。 設定範囲: 10 ~ 4500 | 4500[Hz] |
PB47 NHQ3 ノッチ形状選択3
機械共振抑制フィルタ3の形状を設定してください。
| 設定桁 | 機能 | 初期値 |
|---|---|---|
| _ _ _ x | 機械共振抑制フィルタ3選択 0: 無効 1: 有効 | 0h |
| _ _ x _ | ノッチ深さ選択 0: -40 dB 1: -14 dB 2: -8 dB 3: -4 dB | 0h |
| _ x _ _ | ノッチ広さ選択 0: α = 2 1: α = 3 2: α = 4 3: α = 5 | 0h |
| x _ _ _ | メーカ設定用 | 0h |
PB48 NH4 機械共振抑制フィルタ4
| 機能 | 初期値 |
|---|---|
| 機械共振抑制フィルタ4のノッチ周波数を設定してください。 [Pr. PB49] の “機械共振抑制フィルタ4選択” で “有効 (_ _ _ 1)” を選択したとき、このパラメータの設定値が有効になります。 設定範囲: 10 ~ 4500 | 4500[Hz] |
PB49 NHQ4 ノッチ形状選択4
機械共振抑制フィルタ4の形状を設定してください。
| 設定桁 | 機能 | 初期値 |
|---|---|---|
| _ _ _ x | 機械共振抑制フィルタ4選択 0: 無効 1: 有効 この設定値を “有効” にしたときは、[Pr. PB17 軸共振抑制フィルタ] は使用できません。 | 0h |
| _ _ x _ | ノッチ深さ選択 0: -40 dB 1: -14 dB 2: -8 dB 3: -4 dB | 0h |
| _ x _ _ | ノッチ広さ選択 0: α = 2 1: α = 3 2: α = 4 3: α = 5 | 0h |
| x _ _ _ | メーカ設定用 | 0h |
PB50 NH5 機械共振抑制フィルタ5
| 機能 | 初期値 |
|---|---|
| 機械共振抑制フィルタ5のノッチ周波数を設定してください。 [Pr. PB51] の “機械共振抑制フィルタ5選択” で “有効 (_ _ _ 1)” を選択したとき、このパラメータの設定値が有効になります。 設定範囲: 10 ~ 4500 | 4500[Hz] |
PB51 NHQ5 ノッチ形状選択5
機械共振抑制フィルタ5の形状を設定してください。
[Pr. PE41] の “ロバストフィルタ選択” で “有効 (_ _ _ 1)” を選択した場合、機械共振抑制フィルタ5は使用できません。
| 設定桁 | 機能 | 初期値 |
|---|---|---|
| _ _ _ x | 機械共振抑制フィルタ5選択 0: 無効 1: 有効 | 0h |
| _ _ x _ | ノッチ深さ選択 0: -40 dB 1: -14 dB 2: -8 dB 3: -4 dB | 0h |
| _ x _ _ | ノッチ広さ選択 0: α = 2 1: α = 3 2: α = 4 3: α = 5 | 0h |
| x _ _ _ | メーカ設定用 | 0h |
PB52 VRF21 制振制御2 振動周波数設定
| 機能 | 初期値 |
|---|---|
| 低周波の機械振動を抑制する制振制御2の振動周波数を設定してください。 [Pr. PB02] の “制振制御2チューニングモード選択” で “自動設定 ( _ _ 1 _ )” を選択し た場合、このパラメータは自動設定されます。 “マニュアル設定 ( _ _ 2 _ )” を選択した場合、このパラメータに書き込んだ値を使用します。 [Pr. PA24] の “振動抑制モード選択” で “3慣性モード ( _ _ 1 _ )” を選択した場合、このパラメータの設定値が有効になります。 [Pr. PB07] の値によって、このパラメータの設定範囲が変わります。 設定範囲外の値を設定した場合、制振制御が無効になります。 設定範囲: 0.1 ~ 300.0 | 100.0[Hz] |
PB53 VRF22 制振制御2 共振周波数設定
| 機能 | 初期値 |
|---|---|
| 低周波の機械振動を抑制する制振制御2の共振周波数を設定してください。 [Pr. PB02] の “制振制御2チューニングモード選択” で “自動設定 ( _ _ 1 _ )” を選択し た場合、このパラメータは自動設定されます。 “マニュアル設定 ( _ _ 2 _ )” を選択した場合、このパラメータに書き込んだ値を使用します。 [Pr. PA24] の “振動抑制モード選択” で “3慣性モード ( _ _ 1 _ )” を選択した場合、このパラメータの設定値が有効になります。 [Pr. PB07] の値によって、このパラメータの設定範囲が変わります。 設定範囲外の値を設定した場合、制振制御が無効になります。 設定範囲: 0.1 ~ 300.0 | 100.0[Hz] |
PB54 VRF23 制振制御2 振動周波数ダンピング設定
| 機能 | 初期値 |
|---|---|
| 低周波の機械振動を抑制する制振制御2の振動周波数のダンピングを設定してください。 [Pr. PB02] の “制振制御2チューニングモード選択” で “自動設定 ( _ _ 1 _ )” を選択し た場合、このパラメータは自動設定されます。 “マニュアル設定 ( _ _ 2 _ )” を選択し た場合、このパラメータに書き込んだ値を使用します。 [Pr. PA24] の “振動抑制モード選択” で “3慣性モード ( _ _ 1 _ )” を選択した場合、このパラメータの設定値が有効になります。 設定範囲: 0.00 ~ 0.30 | 0.00 |
PB55 VRF24 制振制御2 共振周波数ダンピング設定
| 機能 | 初期値 |
|---|---|
| 低周波の機械振動を抑制する制振制御2の共振周波数のダンピングを設定してください。 [Pr. PB02] の “制振制御2チューニングモード選択” で “自動設定 ( _ _ 1 _ )” を選択した場合、このパラメータは自動設定されます。 “マニュアル設定 ( _ _ 2 _ )” を選択し た場合、このパラメータに書き込んだ値を使用します。 [Pr. PA24] の “振動抑制モード選択” で “3慣性モード ( _ _ 1 _ )” を選択した場合、このパラメータの設定値が有効になります。 設定範囲: 0.00 ~ 0.30 | 0.00 |
PB56 VRF21B ゲイン切換え制振制御2 振動周波数設定
| 機能 | 初期値 |
|---|---|
| ゲイン切換え有効時の制振制御2の振動周波数を設定してください。 0.1 Hz未満を設定した場合,[Pr. PB52] の設定値と同じ値になります。 次の条件のときにのみ有効になります。 ・[Pr. PA08] の “ゲイン調整モード選択” で “マニュアルモード ( _ _ _ 3 )” を選択した。 ・[Pr. PA24] の “振動抑制モード選択” で “3慣性モード ( _ _ _ 1 )” を選択した。 ・[Pr. PB02] の “制振制御2チューニングモード選択” で “マニュアル設定 ( _ _ 2 _ )” を選択した。 ・[Pr. PB26] の “ゲイン切換え選択” で “入力デバイス (CDP (ゲイン切換え)) ( _ _ _ 1 )” を選択した。 運転中に切り換えるとショックが発生する場合があります。 必ずサーボモータまたはリニアサーボモータが停止してから切り換えてください。 設定範囲: 0.0 ~ 300.0 | 0.0[Hz] |
PB57 VRF22B ゲイン切換え制振制御2 共振周波数設定
| 機能 | 初期値 |
|---|---|
| ゲイン切換え有効時の制振制御2の共振周波数を設定してください。 0.1 Hz未満を設定した場合、[Pr. PB53] の設定値と同じ値になります。 次の条件のときにのみ有効になります。 ・[Pr. PA08] の “ゲイン調整モード選択” で “マニュアルモード ( _ _ _ 3 )” を選択した。 ・[Pr. PA24] の “振動抑制モード選択” で “3慣性モード ( _ _ _ 1 )” を選択した。 ・[Pr. PB02] の “制振制御2チューニングモード選択” で “マニュアル設定 ( _ _ 2 _ )” を選択した。 ・[Pr. PB26] の “ゲイン切換え選択” で “入力デバイス (CDP (ゲイン切換え)) ( _ _ _ 1 )” を選択した。 運転中に切り換えるとショックが発生する場合があります。 必ずサーボモータまたはリニアサーボモータが停止してから切り換えてください。 設定範囲: 0.0 ~ 300.0 | 0.0[Hz] |
PB58 VRF23B ゲイン切換え制振制御2 振動周波数ダンピング設定
| 機能 | 初期値 |
|---|---|
| ゲイン切換え有効時の制振制御2の振動周波数ダンピングを設定してください。 次の条件のときにのみ有効になります。 ・[Pr. PA08] の “ゲイン調整モード選択” で “マニュアルモード (_ _ _ 3 )” を選択した。 ・[Pr. PA24] の “振動抑制モード選択” で “3慣性モード ( _ _ _ 1 )” を選択した。 ・[Pr. PB02] の “制振制御2チューニングモード選択” で “マニュアル設定 ( _ _ 2 _ )” を選択した。 ・[Pr. PB26] の “ゲイン切換え選択” で “入力デバイス (CDP (ゲイン切換え)) ( _ _ _ 1 )” を選択した。 運転中に切り換えるとショックが発生する場合があります。 必ずサーボモータまたはリニアサーボモータが停止してから切り換えてください。 設定範囲: 0.00 ~ 0.30 | 0.00 |
PB59 VRF24B ゲイン切換え制振制御2 共振周波数ダンピング設定
| 機能 | 初期値 |
|---|---|
| ゲイン切換え有効時の制振制御2の共振周波数ダンピングを設定してください。 次の条件のときにのみ有効になります。 ・[Pr. PA08] の “ゲイン調整モード選択” で “マニュアルモード ( _ _ _ 3 )” を選択した。 ・[Pr. PA24] の “振動抑制モード選択” で “3慣性モード ( _ _ _ 1 )” を選択した。 ・[Pr. PB02] の “制振制御2チューニングモード選択” で “マニュアル設定 ( _ _ 2 _ )” を選択した。 ・[Pr. PB26] の “ゲイン切換え選択” で “入力デバイス (CDP (ゲイン切換え)) ( _ _ _ 1 )” を選択した。 運転中に切り換えるとショックが発生する場合があります。 必ずサーボモータまたはリニアサーボモータが停止してから切り換えてください。 設定範囲: 0.00 ~ 0.30 | 0.00 |
PB60 PG1B ゲイン切換えモデル制御ゲイン
| 機能 | 初期値 |
|---|---|
| ゲイン切換え有効時のモデル制御ゲインを設定してください。 1.0 rad/s未満を設定した場合、[Pr. PB07] の設定値と同じ値になります。 次の条件のときにのみ有効になります。 ・[Pr. PA08] の “ゲイン調整モード選択” で “マニュアルモード ( _ _ _ 3 )” を選択した。 ・[Pr. PB26] の “ゲイン切換え選択” で “入力デバイス (CDP (ゲイン切換え)) ( _ _ _ 1 )” を選択した。 運転中に切り換えるとショックが発生する場合があります。 必ずサーボモータまたはリニアサーボモータが停止してから切り換えてください。 設定範囲: 0.0 ~ 2000.0 | 0.0[rad/s] |
コメント