| パラメータNo. | #7 | #6 | #5 | #4 | #3 | #2 | #1 | #0 |
|---|---|---|---|---|---|---|---|---|
| 3001 | MHI | PGS | RWM | SON | ||||
| 3002 | OVM | POV | IOV | MFD | CHM | |||
| 3003 | DEC | DAU | DIT | ITX | ITL | |||
| 3004 | OTH | BCY | BSL | |||||
| 3006 | WPS | EPS | EPN | GDC | ||||
| 3008 | XSG |
| パラメータNo. | 詳細 |
|---|---|
| 3010 | ストローブ信号MF、SF、TF、BFの遅れ時間 |
| 3011 | M、S、T、B 機能完了信号(FIN)の受付幅 |
| 3012 | スキップ信号を割り付けるアドレス |
| 3013 | レファレンス点復帰用減速信号を割り付けるXアドレス |
| 3014 | レファレンス点復帰用減速信号を割り付けるXアドレスのビット位置 |
| 3017 | リセット信号RSTの出力時間 |
| 3018 | 補助機能実行時の1%早送りオーバライド信号が0%のときのパーセンテージ |
| 3019 | PMC軸制御のスキップ信号、測定位置到達信号、工具補正量書込み信号を割り付けるアドレス |
| 3020 | 外部ワーク番号サーチのワーク番号とプログラム番号の対応(PN) |
| 3021 | 軸信号を割り付けるアドレス |
| 3022 | 主軸信号を割り付けるアドレス |
| 3030 | Mコードの許容桁数 |
| 3031 | Sコードの許容桁数 |
| 3032 | Fコードの許容桁数 |
| 3033 | Bコード(第2補助機能)の許容桁数 |
| 3037 | 周辺軸制御1の個別設定信号を割り付けるアドレス |
| 3038 | 周辺軸制御2の個別設定信号を割り付けるアドレス |
| 3039 | 周辺軸制御3の個別設定信号を割り付けるアドレス |
| 3040 | 周辺軸制御1のパラメータおよびDI/DOとして使用する系統番号 |
| 3041 | 周辺軸制御2のパラメータおよびDI/DOとして使用する系統番号 |
| 3042 | 周辺軸制御3のパラメータおよびDI/DOとして使用する系統番号 |
パラメータNo.3001
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
自動運転の起動は、自動運転起動信号ST<Gn007.2>の
├ 0:立ち下がり(”1”→”0”)
└ 1:立ち上がり(”0”→”1”)
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
プログラムメモリ内のプログラムの頭出し中にリワインド中信号RWD<Fn000.0>を出力
├ 0:しない
└ 1:する
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
高速プログラムチェックモード中、M,S,T,Bコードの出力を
├ 0:しない
└ 1:する
注意
- 本パラメータが1の場合、高速プログラムチェックモード開始/終了時に、M,S,T,Bコードは保存/復元されません
そのため、高速プログラムチェックモード中に出力されたM,S,T,Bコードが、高速プログラムチェックモード終了後も有効となります - 本パラメータが1の場合、高速プログラムチェックモード中にM,S,T,BコードがPMC側に出力されます
よって、高速プログラムチェックモード中にM,S,T,B指令を実行する必要がない場合には、高速プログラムチェックモード中信号<Fn290.5>を参照して、M,S,T,Bコードが実行されないようなラダーシーケンスとしてください - 本パラメータが1の場合のM,S,T,Bコードの動作は、補助機能ロック信号AFL<Gn005.6>の状態に従います
- 高速プログラムチェックモード中、本ビットパラメータをG10にて書き換えた場合、アラーム(PS5364)”プログラムチェック中に不正指令”が発生します
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
M,S,T,Bのストローブ信号と完了信号の方式は
├ 0:通常タイプ
└ 1:高速タイプ
パラメータNo.3002
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
高速M,S,T,Bにおいて分配完了信号DEN<Fn001.3>および補助機能コード信号M00~M31 <Fn010~Fn013>は補助機能の実行が完了するとオフ
├ 0:しない
└ 1:する
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
高速M,S,T,Bインタフェースを使用しているとき、Mコード、Sコード、Tコード、およびBコードと同一ブロックに移動指令、またはドウェル指令が無かった場合、分配完了信号DEN<Fn001.3>と各機能のストローブ信号(MF<Fn007.0>,SF<Fn007.2>,TF<Fn007.3>,BF<Fn007.7>)の出力するタイミングは
├ 0:従来通り(分配完了信号が遅れて出力される)
└ 1:同じタイミングで出力されます
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
オーバライド関係の信号論理を
├ 0:負論理の信号は負論理、正論理の信号は正論理(通常)
└ 1:負論理の信号は正論理、正論理の信号は負論理(反転)
注意
このパラメータは以下の信号に影響します
負論理の信号
- 送り速度オーバライド信号*FV0~*FV7<Gn012>
- 第2送り速度オーバライド信号*AFV0~*AFV7<Gn013>
- 0.01%第2送り速度オーバライド信号*APF00~*APF15<Gn094,Gn095>
- 送り速度オーバライド信号(PMC軸制御用)*EFOV0g~*EFOV7g<G0151/G0163/G0175/G0187>
- ソフトウェアオペレータズパネル信号*FV0O~*FV7O<Fn078>
正論理の信号
- 早送りオーバライド信号ROV1,ROV2<Gn014.0,Gn014.1>
- ソフトウェアオペレータズパネル信号ROV1O,ROV2O<Fn076.4,Fn076.5>
- 早送りオーバライド信号(PMC軸制御用)EROV1g,EROV2g
- <G0150.0,G0150.1/G0162.0,G0162.1/G0174.0,G0174.1/G0186.0,G0186.1>
影響を受けない信号は次のとおりです
- 1%早送りオーバライド選択信号HROV<Gn096.7>
- 1%早送りオーバライド信号*HROV0~*HROV6<Gn096.0~Gn096.6>
- 0.1%早送りオーバライド選択信号FHROV<Gn353.7>
- 0.1%早送りオーバライド信号*FHRO0~*FHRO9<Gn352.0~Gn352.7,Gn353.0~Gn353.1>
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
ドウェル・補助機能時間オーバライド機能は
├ 0:無効
└ 1:有効
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
ドウェル・補助機能時間オーバライド機能において、M02,M30に対してオーバライドは
├ 0:無効
└ 1:有効
パラメータNo.3003
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
全軸インタロック信号は
├ 0:有効
└ 1:無効
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
各軸インタロック信号は
├ 0:有効
└ 1:無効
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
軸方向別インタロック信号は
├ 0:有効
└ 1:無効
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
パラメータ DIT(No.3003#3)=0の時、軸方向別インタロック信号は
├ 0:手動運転=有効、自動運転=無効
└ 1:手動運転、自動運転のいずれも有効
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
レファレンス点復帰用減速信号(*DEC1 .. *DEC8 <X0009.0…X0009.7>)は
├ 0:信号が”0”のとき減速
└ 1:信号が”1”のとき減速
パラメータNo.3004
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
ブロック開始インタロック信号*BSL<Gn008.3>および切削ブロック開始インタロック信号*CSL<Gn008.1>は
├ 0:無効
└ 1:有効
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
ブロック開始インタロック信号*BSL<Gn008.3>は、固定サイクルのように 1つのブロックの指令でいくつもの動作を行う指令の場合
├ 0:最初のサイクルの開始時だけチェックする
└ 1:各サイクルの実行開始にチェックする
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
オーバトラベル信号のチェックを
├ 0:する
└ 1:しない
注意
安全のため通常はオーバトラベル信号のチェックをしてください
パラメータNo.3006
| パラメータNo. | 詳細 |
|---|---|
| 3013 | レファレンス点復帰用減速信号を割り付けるXアドレス |
- 入力区分
└ パラメータ入力 - データ形式
└ ビット形
レファレンス点復帰用減速信号*DECの割り当てアドレスは
├ 0:<X0009>
└ 1:<Gn196>
注意
本パラメータに0が設定されている状態で、信号*DEC<X0009>を別の用途で使用していた場合には予期しない機械動作を引き起こします
使用する Xアドレスが競合をしないよう十分にご注意ください
- 入力区分
└ パラメータ入力 - データ形式
└ ビット形
外部ワーク番号サーチにおいて、ワーク番号を指定する信号は
├ 0:外部ワーク番号サーチ信号PN1~PN16 ※1~31の指定が可能
└ 1:拡張外部ワーク番号サーチ信号EPN0~EPN13 ※1~9999の指定が可能
- 入力区分
└ パラメータ入力 - データ形式
└ ビット形
外部ワーク番号サーチの起動信号は
├ 0:自動運転起動信号STを使用する ※自動運転(メモリ運転)が起動されたときにサーチ開始
└ 1:外部ワーク番号サーチ起動信号EPNSを使用する ※STではサーチを開始しない
- 入力区分
└ パラメータ入力 - データ形式
└ ビット形
各軸ワーク座標系プリセット信号を
├ 0:つかわない
└ 1:利用する
パラメータNo.3008
| パラメータNo. | #7 | #6 | #5 | #4 | #3 | #2 | #1 | #0 |
|---|---|---|---|---|---|---|---|---|
| 3008 | XSG |
- 入力区分
└ パラメータ入力 - データ形式
└ ビット系統形
Xアドレスに割り付けられている信号は
├ 0:固定アドレスとする
└ 1:任意のXアドレスに変更可能とする
注意
- パラメータを変更した際はシステムを再起動してください
- 1を設定した場合には、パラメータ(No.3013、No.3014、No.3012、No.3019)を設定してください
パラメータ(No.3013、No.3014)を設定しないと、<X0000>の0ビットにレファレンス点復帰用減速信号*DECが割り付けられます
また、パラメータ(No.3012、No.3019)を設定しないと、スキップ信号、PMC軸制御のスキップ信号、測定位置到達信号、軸方向別手動送りインタロック信号、工具補正量書き込み信号が<X0000>に割り付けられます - 1を設定する場合、あらかじめパラメータ(No.3013、No.3014、No.3012、No.3019)に適切な値を設定してください
パラメータ(No.3013、No.3014、No.3012、No.3019)に設定したアドレスを別の用途で使用していた場合には予期しない機械動作が行われることがあります。使用するXアドレスが競合をしないよう十分にご注意ください
パラメータNo.3010
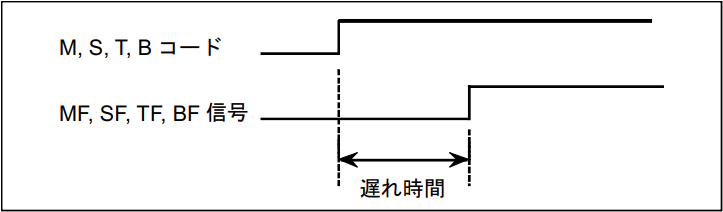
| パラメータNo. | 詳細 |
|---|---|
| 3010 | ストローブ信号MF、SF、TF、BFの遅れ時間 |
- 入力区分
└ パラメータ入力 - データ形式
└ ワード系統形 - データ単位
└ msec - データ範囲
└ 0 ~ 32767
M,S,T,Bコードが送出されてから、ストローブ信号 MF<Fn007.0>, SF<Fn007.2>, TF<Fn007.3>,BF<Fn007.7>信号を送出するまでの時間を設定します
注意
時間のカウントは4msごとに行われ、4ms未満の端数分は切上げられます
【設定例】
設定値=30のとき32msと見なします
設定値=0のとき4msと見なします
高速M/S/T/Bインタフェースをご使用の場合は、設定値 = 0 : 0msと見なします
また、時間のカウント周期はシステムにより変わります
パラメータNo.3011
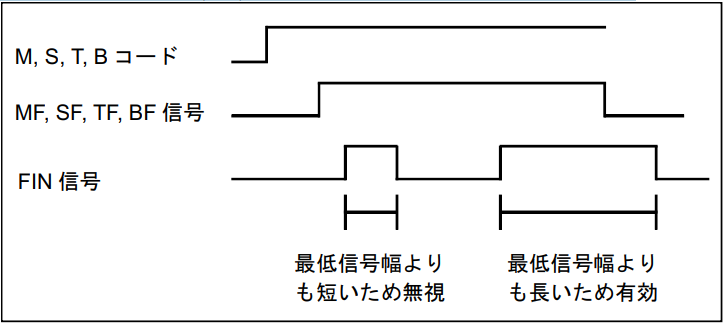
| パラメータNo. | 詳細 |
|---|---|
| 3011 | M、S、T、B 機能完了信号(FIN)の受付幅 |
- 入力区分
└ パラメータ入力 - データ形式
└ ワード系統形 - データ単位
└ msec - データ範囲
└ 0 ~ 32767
M, S, T, B機能完了信号(FIN)を有効とみなす最低信号幅を設定します
注意
時間のカウントは4msごとに行われ、4ms未満の端数分は切上げられます
【設定例】
設定値=30のとき32msと見なします
設定値=0のとき4msと見なします
高速M/S/T/Bインタフェースをご使用の場合は、設定値 = 0 : 0msと見なします
また、時間のカウント周期はシステムにより変わります
パラメータNo.3012
| パラメータNo. | 詳細 |
|---|---|
| 3012 | スキップ信号を割り付けるアドレス |
- 入力区分
└ パラメータ入力 - データ形式
└ ワード系統形 - データ範囲
└ 0 ~ 727
Xアドレスのスキップ信号(SKIPn)を割り付けるアドレスを設定します
注意
- パラメータを変更した際はシステムを再起動してください
- 本パラメータは、パラメータ XSG(No.3008#2)が 1と設定されている時に有効です
実際に使用できる Xアドレスは以下のとおり
<X0~X127>, <X200~X327>, <X400~X527>, <X600~X727>
※I/O Linkの構成により変わります - 本パラメータに設定したアドレスを別の用途で使用していた場合、予期しない機械動作をします
使用するXアドレスが競合をしないよう十分にご注意ください
パラメータNo.3013
| パラメータNo. | 詳細 |
|---|---|
| 3013 | レファレンス点復帰用減速信号を割り付けるXアドレス |
- 入力区分
└ パラメータ入力 - データ形式
└ ワード軸形 - データ範囲
└ 0 ~ 727
各軸のレファレンス点復帰用減速信号(*DECn)を割り付けるアドレスを設定します
注意
- パラメータを変更した際はシステムを再起動してください
- 本パラメータは、パラメータ XSG(No.3008#2)が 1と設定されている時に有効です
実際に使用できる Xアドレスは以下のとおり
<X0~X127>, <X200~X327>, <X400~X527>, <X600~X727>
※I/O Linkの構成により変わります - 本パラメータに設定したアドレスを別の用途で使用していた場合、予期しない機械動作をします
使用するXアドレスが競合をしないよう十分にご注意ください
パラメータNo.3014
| パラメータNo. | 詳細 |
|---|---|
| 3014 | レファレンス点復帰用減速信号を割り付けるXアドレスのビット位置 |
- 入力区分
└ パラメータ入力 - データ形式
└ バイト軸形 - データ範囲
└ 0 ~ 7
各軸のレファレンス点復帰用減速信号(*DECn)を割り付けるアドレスを設定します
注意
- パラメータを変更した際はシステムを再起動してください
- 本パラメータは、パラメータ XSG(No.3008#2)が 1と設定されている時に有効です
パラメータNo.3017
| パラメータNo. | 詳細 |
|---|---|
| 3017 | リセット信号RSTの出力時間 |
- 入力区分
└ パラメータ入力 - データ形式
└ ワード系統形 - データ単位
└ 16msec - データ範囲
└ 0 ~ 255
リセット中信号 RSTの出力時間を延長したい場合延長時間を設定します
(RST信号の出力時間)=(リセット処理にかかる時間)+(パラメータ設定値)×16msec
パラメータNo.3018
| パラメータNo. | 詳細 |
|---|---|
| 3018 | 補助機能実行時の1%早送りオーバライド信号が0%のときのパーセンテージ |
- 入力区分
└ パラメータ入力 - データ形式
└ バイト系統形 - データ単位
└ % - データ範囲
└ 0 ~ 100
ドウェル・補助機能時間オーバライド機能において1%早送りオーバライド信号が0%の場合、不足時間を算出するための%値を設定します
0%の時は10%として扱います
パラメータNo.3019
| パラメータNo. | 詳細 |
|---|---|
| 3019 | PMC軸制御のスキップ信号、測定位置到達信号、工具補正量書込み信号を割り付けるアドレス |
- 入力区分
└ パラメータ入力 - データ形式
└ バイト系統形 - データ単位
└ % - データ範囲
└ 0 ~ 100
Xアドレスの PMC軸制御のスキップ信号 ESKIP、測定位置到達信号(XAE、YAE、ZAE(M系)、XAE、ZAE(T系))、工具補正量書込み信号(±MIT1,±MIT2(T系))を割り付けるアドレスを設定します
【例】パラメータ(No.3012)=5、(No.3019)=6を設定したとき
パラメータ XSG(No.3008#2)が 1のとき、PMC軸制御のスキップ信号、測定位置到達信号、工具補正量書き込み信号がX0006に、スキップ信号がX0005に割り付けられます
| タイプ | #7 | #6 | #5 | #4 | #3 | #2 | #1 | #0 |
|---|---|---|---|---|---|---|---|---|
| T系 | SKIP | SKIP6 | SKIP5 | SKIP4 | SKIP3 | SKIP2 | SKIP8 | SKIP7 |
| M系 | SKIP | SKIP6 | SKIP5 | SKIP4 | SKIP3 | SKIP2 | SKIP8 | SKIP7 |
| タイプ | #7 | #6 | #5 | #4 | #3 | #2 | #1 | #0 |
|---|---|---|---|---|---|---|---|---|
| T系 | ESKIP | -MIT2 | +MIT2 | -MIT1 | +MIT1 | ZAE | XAE | |
| M系 | ESKIP | ZAE | YAE | XAE |
【例】パラメータ(No.3012)=5、(No.3019)=5を設定したとき
パラメータXSG(No.3008#2)が1のとき、PMC軸制御のスキップ信号、測定位置到達信号、工具補正量書き込み信号、スキップ信号のすべてがX0005に割り付けられます
| #7 | #6 | #5 | #4 | #3 | #2 | #1 | #0 |
|---|---|---|---|---|---|---|---|
| SKIP | ESKIP | -MIT2 | +MIT2 | -MIT1 | +MIT1 | ZAE | XAE |
| SKIP | SKIP6 | SKIP5 | SKIP4 | SKIP3 | SKIP2 | SKIP8 | SKIP7 |
| #7 | #6 | #5 | #4 | #3 | #2 | #1 | #0 |
|---|---|---|---|---|---|---|---|
| SKIP | ESKIP | SKIP5 | SKIP4 | SKIP3 | ZAE | YAE | XAE |
| SKIP | SKIP6 | SKIP5 | SKIP4 | SKIP3 | SKIP2 | SKIP8 | SKIP7 |
注意
- パラメータを変更した際はシステムを再起動してください
- 本パラメータは、パラメータ XSG(No.3008#2)が 1と設定されている時に有効です
実際に使用できる Xアドレスは以下のとおり
X0~X127, X200~X327, X400~X527, X600~X727 ※I/O Linkの構成によります - 本パラメータに設定したアドレスを別の用途で使用していた場合には予期しない機械動作をします
使用するXアドレスが競合をしないよう十分にご注意ください
パラメータNo.3020
| パラメータNo. | 詳細 |
|---|---|
| 3020 | 外部ワーク番号サーチのワーク番号とプログラム番号の対応(PN) |
- 入力区分
└ パラメータ入力 - データ形式
└ 2ワード系統形 - データ範囲
└ -1 ~ 99
設定する値により次のような意味になります。
- 設定値0~99のとき
(プログラム番号)=(設定値)*100+(ワーク番号)
つまり、設定値がプログラム番号の上位 2桁の指定となります - 設定値-1のとき
プログラム番号上位 2桁は、存在するプログラム番号のうち最小の番号となります
[例]
ワーク番号21を指定した場合、O0021,O0121,O0221などを検索します
O0021が無く、O0121,O0221が存在する場合はO0121がプログラム番号となります
注意
このパラメータは PN1..PN16信号によりワーク番号を指定する場合(パラメータEPN(No.3006#1)=0)に有効です
パラメータNo.3021
| パラメータNo. | 詳細 |
|---|---|
| 3021 | 軸信号を割り付けるアドレス |
- 入力区分
└ パラメータ入力 - データ形式
└ バイト軸形 - データ範囲
└ 0 ~ 7、10 ~ 17、20 ~27、…、90 ~ 97
CNCの各軸についてPMCのインタフェースアドレスを設定します
| 設定値 | 入力信号アドレス | 出力信号アドレス |
|---|---|---|
| 0 | G0000~G0767 | F0000~F0767 |
| 1 | G1000~G1767 | F1000~F1767 |
| ︙ | ︙ | ︙ |
| 9 | G9000~G9767 | F9000~F9767 |
| 設定値 | 入力信号アドレス | 出力信号アドレス |
|---|---|---|
| 0 | #0 | #0 |
| 1 | #1 | #1 |
| ︙ | ︙ | ︙ |
| 7 | #7 | #7 |
[設定例]
| 軸番号 | パラメータ No.3021 | 信号配置 |
|---|---|---|
| 1 | 0 | +J1<G0100.0>, -J1<G0102.0>, ZP1<F0090.0>, … |
| 2 | 1 | +J2<G0100.1>, -J2<G0102.1>, ZP2<F0090.1>, … |
| 3 | 2 | +J3<G0100.2>, -J3<G0102.2>, ZP3<F0090.2>, … |
| 4 | 10 | +J4<G1100.0>, -J4<G1102.0>, ZP4<F1090.0>, … |
| 5 | 11 | +J5<G1100.1>, -J5<G1102.1>, ZP5<F1090.1>, … |
1系統あたり8軸以下の場合、全軸0に設定すると次の信号配置となります
- 系統1の第1軸=設定値0相当
- 系統1の第2軸=設定値1相当
- ・・・
- 系統2の第1軸=設定値10相当
- ・・・
注意
- パラメータを変更した際はシステムを再起動してください
- 1系統あたり8軸を越える場合に設定してください
- 設定範囲はシステムソフトにより異なります
パラメータNo.3022
| パラメータNo. | 詳細 |
|---|---|
| 3022 | 主軸信号を割り付けるアドレス |
- 入力区分
└ パラメータ入力 - データ形式
└ バイト軸形 - データ範囲
└ 0 ~ 3、10 ~ 13、20 ~23、…、90 ~ 93
CNCの各軸についてPMCのインタフェースアドレスを設定します
| 設定値 | 入力信号アドレス | 出力信号アドレス |
|---|---|---|
| 0 | G0000~G0767 | F0000~F0767 |
| 1 | G1000~G1767 | F1000~F1767 |
| ︙ | ︙ | ︙ |
| 9 | G9000~G9767 | F9000~F9767 |
| 設定値 | 入力信号アドレス | 出力信号アドレス |
|---|---|---|
| 0 | ビット位置A | ビット位置A |
| 1 | ビット位置B | ビット位置B |
| 2 | ビット位置C | ビット位置C |
| 3 | ビット位置D | ビット位置D |
※ビット位置A,B,C,Dは信号の種類により異なります
[設定例]
| 軸番号 | パラメータ No.3021 | 信号配置 |
|---|---|---|
| 1 | 0 | TLMLA<G0070.0>, TLMHA<G0070.1>, ALMA<F0045.0>, … |
| 2 | 1 | TLMLB<G0074.0>, TLMHB<G0074.1>, ALMB<F0049.0>, … |
| 3 | 10 | TLMLA<G1070.0>, TLMHA<G1070.1>, ALMA<F1045.0>, … |
| 4 | 11 | TLMLB<G1074.0>, TLMHB<G1074.1>, ALMB<F1049.0>, … |
1系統あたり4主軸以下の場合、全軸を0に設定すると以下の通りになります
- 系統1の第1主軸=設定値0相当
- 系統1の第2主軸=設定値1相当
- ・・・
- 系統2の第1主軸=設定値10相当
- ・・・
注意
- パラメータを変更した際はシステムを再起動してください
- 設定範囲はシステムソフトにより異なります
パラメータNo.3030、3031、3032
- 入力区分
└ パラメータ入力 - データ形式
└ バイト系統形 - データ範囲
└ 1 ~ 8
M,S,Tコードの許容桁数を設定します
0が設定されている場合には、許容桁数を8桁とみなします
パラメータNo.3033
| パラメータNo. | 詳細 |
|---|---|
| 3033 | Bコード(第2補助機能)の許容桁数 |
- 入力区分
└ パラメータ入力 - データ形式
└ バイト系統形 - データ範囲
└ 1 ~ 8
第2補助機能の許容桁数を設定します
0が設定されている場合には、許容桁数は8桁とみなされます
小数点入力を可能とするには、パラメータ AUP(No.3450#0)=1とする必要があります
この場合、本パラメータに設定する許容桁数は、小数点以下桁数を含んだ桁数となります
許容桁数を越えた指令を行うと、アラーム(PS0003)『データが許容範囲を越えました』となります
パラメータNo.3037、3038、3039
- 入力区分
└ パラメータ入力 - データ形式
└ バイト形 - データ範囲
└ 2 ~ 4
周辺軸制御1~3の個別設定信号を割り付けるアドレスを設定します
(設定値-1)*1000の信号を使用します
設定値が範囲外またはすでに割り付けられている場合、その周辺軸制御は無効となります
【例1】3と設定した場合
( 3 – 1 )× 1000 = 2000で G2000~,F2000~を使用します
【例2】2系統システムの場合
パラメータ(No.3037~3039)の設定範囲は3~となります
注意
- 設定範囲はシステムソフトウェアの系列により異なります
- 各系統の系統形信号が割り付けられているアドレスは指定できません
- 本パラメータを変更した場合、プログラムファイルをクリアしてください
パラメータNo.3040、3041、3042
| パラメータNo. | 詳細 |
|---|---|
| 3040 | 周辺軸制御1のパラメータおよびDI/DOとして使用する系統番号 |
| 3041 | 周辺軸制御2のパラメータおよびDI/DOとして使用する系統番号 |
| 3042 | 周辺軸制御3のパラメータおよびDI/DOとして使用する系統番号 |
- 入力区分
└ パラメータ入力 - データ形式
└ バイト形 - データ範囲
└ 1 ~ 系統数
本パラメータに設定した系統番号の系統形パラメータおよび系統形DI/DOが、周辺軸制御1~3に適用されます
リセット信号などの一部のDI/DOについては、パラメータ(No.3037~3039)を使用します
設定値が範囲外の場合、その周辺軸制御は無効となります
注意
- このパラメータを変更した際はシステムを再起動してください
- 本パラメータを変更した場合プログラムファイルをクリアしてください
コメント